| - Home page |
| - No.237 目次 |
| + 研究紹介 |
| - お知らせ |
| - ISAS事情 |
| - 宇宙を探る |
| - 東奔西走 |
| - 惑星探査のテクノロジー |
| - いも焼酎 |
| - 編集後記 |
| - BackNumber |
| 用語解説 |
| マスク |
| フォトリソグラフィ |
| ステータ電極 |
| 印可電圧 |
2. 研究室の概要
生産技術研究所は六本木から駒場(旧東大宇宙航空研究所の跡地)に移転の最中ですが,どちらのキャンパスも先端的な科学技術の情報の創造と交換の場になっています。藤田研もその中で,国際交流を含めて活動しています。現在,職員2名,大学院生4名,外国人研究員(フランス国立科学研究センターより派遣)6名,企業からの共同研究員3名など約17名の構成です。研究室メンバーの半数近くがフランス人のため,研究打ち合わせ会も英語を公用語にしています。最初は大変ですが,グローバルスタンダードを目指して皆がんばっています。設備としては,シリコンチップの製作法を利用したミクロの機械の加工法(半導体マイクロマシーニング)に絞り,マスク設計から薄膜形成,フォトリソグラフィ,エッチングなどの微細加工,観察と評価まで一貫して行えるようになっています。 設備の使用を管理する時に一番気をつけているのは,マイクロマシンの製作において最大限の自由度と最短のプロセス時間を目指すことです。論文などの締め切りが迫って特急で仕事をすれば,マスク製作からマイクロマシンの完成まで1週間程度で行えます。このような体制は,考えついたことを直ちに実行して試し,更に改良してゆく上で,極めて大切です。
3.研究テーマ
3.1 マイクロマシンの作り方と動かし方
高性能のマイクロマシンを作るには,立体的なマイクロ構造と良く動くマイクロアクチュエータが不可欠です。立体的なマイクロ構造の作り方として,シリコン基板をプラズマで垂直にエッチングする方法と,シリコンの薄膜を高温で組成変形して立体的に組み上げる方法の二つを開発しました。この加工法を使い,マイクロアクチュエータとして,静電気や磁気の力,圧電効果,磁歪効果,形状記憶効果,熱膨張など様々の原理で動くものを実証しました。例えば図1は,筆者らが表面マイクロマシーニング法で作った,直径120μmのマイクロ静電モータです。材質は,電気めっきしたニッケル膜(厚さ7μm)です。円形に配置したステータ電極に電圧を順に加えると,ドーナツ状のロータが中心の固定軸の周りをすべらずに転がり回ります。俗にワブル(揺動)モータと呼ばれる形式で,中心軸との摩擦が少ないため良く回転します。50Vの駆動電圧で最高10,000回転/分を得ており,ロータの質量が小さいため停止→最高回転→停止のサイクルを1秒間に数回繰り返すことができました。
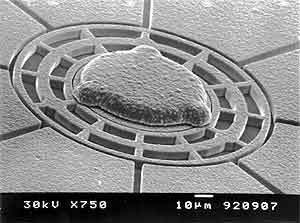
図1 マイクロ静電モータ(直径100μm)
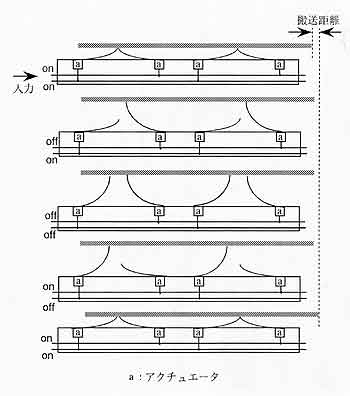
図2は,シリコン基板をプラズマで垂直にエッチングして作った,静電アクチュエータです。これは,ディジタル電気入力に対応するアナログの機械変位を出力する DA変換器で,MEMDACと呼んでいます。4つの入力端子に0 (0V) か 1 (150V)の4ビット信号をパラレルに入れると,380nm刻みで最大5.7μmまでの変位が得られます。アクチュエータの変位は印可電圧の揺らぎによらず,望みの値で安定しています。ビット数を増やせば,nmの制御も可能で,走査プローブ顕微鏡や磁気ディスクヘッドの位置決め機構,可変波長フィルター,光スキャナの角度制御など広い応用が期待されます。
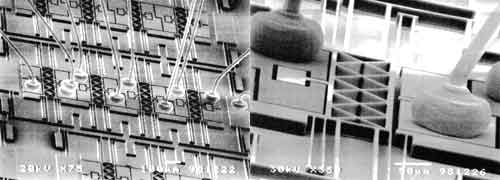
(a) 4ビットデバイスの全体図 (b) 1ビット分の拡大図 図2 静電アクチュエータを用いた機械式ディジタルアナログ変換器