| - Home page |
| - No.227 目次 |
| + 研究紹介 |
| - お知らせ |
| - ISAS事情 |
| - M-V-4/ASTRO-Eの打上げ失敗について |
| - 「おおすみ」30周年 |
| - 宇宙を探る |
| - 東奔西走 |
| - 学びて時にこれを習う |
| - いも焼酎 |
| - 編集後記 |
| - BackNumber |
宇宙ロボティクス・メカトロニクス
東北大学大学院工学研究科 内 山 勝
はじめに
ロボットは,コンピュータを頭脳とし,機械の身体を持つシステムである。コンピュータのソフトフェアにより,機械の身体に組み込まれたセンサとアクチュエータを統合し,機械の身体に動きを与え,目的の作業を実行する。メカトロニクスは,このようなロボットなど,電子制御された機械システムの統合,設計に関する工学である。ロボティクス・メカトロニクスは,マイクロコンピュータに代表されるLSIの発展と普及に伴い,1970年代から80年代にかけて急速に発展した。ロボティクス・メカトロニクスは,宇宙開発あるいは宇宙科学研究におけるオートメーションの有力な手段として,その重要性が広く認識されつつある。有人活動を代替する技術として,あるいは有人活動を補助する技術として,注目に値する。マニピュレータ搭載のロボット衛星による故障衛星の点検,修理,あるいは,ロボットによる宇宙ステーションの建設,宇宙ステーションへの物資の補給,回収などは,もはや夢物語ではなく,具体的な技術開発の目標である。
マイクロコンピュータなどの電子部品を始めとして,モータ,機械部品など,近年のロボティクス・メカトロニクスの要素技術の向上には,目を見張るものがある。また,一方,1980年代から90年代にかけて,ロボティクスは目覚ましく発展し,幾何学,力学,制御などの基礎知識を蓄積した。この蓄積と要素技術の進歩が重なり,これまで不可能であったような,高度なロボットシステムの設計,開発が,現在では可能となりつつある。
このような流れの中で,我々の研究室では,宇宙ロボティクス・メカトロニクスの研究を始めとして,各種ロボティクス・メカトロニクスの応用研究を進めている。研究を先導するキーワードは,「バーチャルリアリティ,ハプティックインタフェース,ハイブリッドシミュレーション」である。このキーワードの共通点は,すべてが「ハードとソフトの接点」に関係している点である。我々は,ここに,メカトロニクス技術の応用の場を見出している。
以下,現在実施中の研究を中心に,これまで実施した研究も付け加え,我々の研究を紹介しよう。まず,宇宙ロボットのテレオペレーション,ハイブリッドシミュレーション,および,双腕フレキシブルロボットによる対象物捕獲の研究について紹介し,最後に,その他の研究について簡単に触れる。
宇宙ロボットのテレオペレーション
現在の技術では,残念ながら,完全自律の知能ロボットの実現は難しい。したがって,宇宙ロボットには,何らかの人間の補助が必要である。テレオペレーションは,このための技術であるが,宇宙ロボットのテレオペレーションでは,通信時間遅れが存在するため,理想的なマスタスレーブ方式の実現が難しい。そこで,宇宙ロボットに一定の自律性を与え,オペレータがこれに指令するテレロボティクスの技術が,ひとつの解となる。この問題に対し,我々の研究室では,最適接近速度,shared intelligenceなどの概念を提案し,これに基づきテレロボットシステムを構築し,実験を実施している。インターネットを介し,ドイツ航空宇宙研究所(DLR)より,遠隔操作実験を行い,ピン挿入などの力制御を必要とする作業を実現した。また,宇宙開発事業団(NASDA)の支援のもと,同様の実験を技術試験衛星ETS-VIIに搭載のロボットに対して行った。
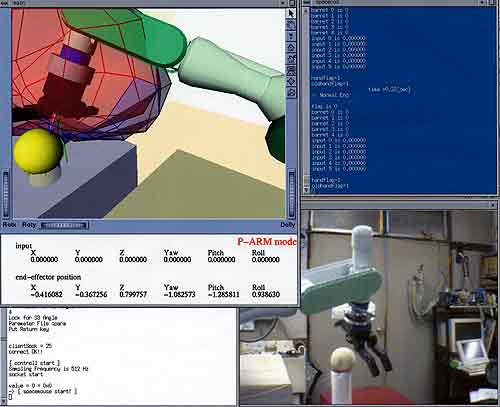
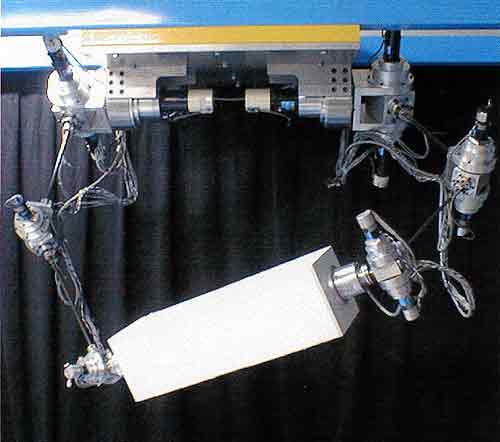
つぎの目標として,双腕ロボットを遠隔操作し,トラス構造物を組み立てる実験を目指している。実験システムの構成を図1に,また,遠隔操作実験の様子を図2に示す。ロボットアームとしてPA-10, ハンドとしてBarrettHandなど,使いやすいコンポーネント,ならびにLinux,VxWorks,MATLAB,Open Inventorなど,強力なソフトの普及が本システムの構築を迅速かつ容易にした。
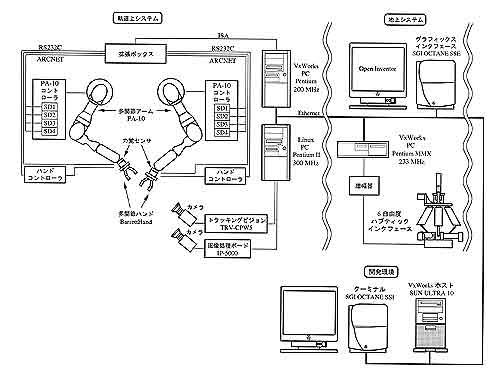
図1 双腕宇宙テレロボット実験システム