軌道の無いミッションは無い?!
宇宙科学研究所 山川 宏
惑星探査ミッションへの参加という希望を持って,新築の相模原キャンパスに修士の学生としてやってきて11年が経ちました。軌道工学を研究する者にとって非常に良い時代で,修士の時は二重月スウィングバイミッション「ひてん」,博士の時代は地球磁気圏観測衛星GEOTAILの軌道計画を手伝っておりました。「ひてん」は月衝突によってその生涯を閉じましたが,「数m/sの軌道修正で地球周回軌道に戻せるのにもったいない」と主張していたことが懐かしく感じられます。また,博士論文のテーマは「重力キャプチャーを用いた地球-月遷移軌道に関する研究」で,月ペネトレータミッションLUNAR-Aで用いられる予定の軌道です。重力キャプチャーとは,大気抵抗などを使わずに重力のみによって,天体の影響圏外から接近する物体が,天体に対して通常の双曲線軌道で予想されるよりも低い相対速度を最接近点で達成する軌道です。条件によっては天体のまわりを一時的に周回する場合があり,惑星の衛星の起源を説明する1つの説と考えられています。月到達時には重力キャプチャーを,そして地球から月に遷移する間では太陽重力を積極的に応用することで,より少ない減速用燃料で同じ月周回軌道を実現できるというメリットがあります。アポロ宇宙船のように直接月に向かう場合と比較して,LUNAR-Aでは150m/s程度の減速量の節約になります。
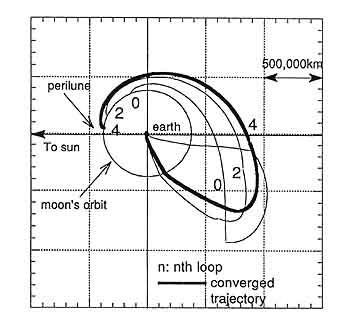
図1 重力キャプチャーを用いた
地球-月遷移軌道(設計時の収束の様子)