MECHATRONICS: State of Art & Future Development
Fumio Harashima
Mechatronics is a relatively new engineering discipline, and is defined as follows: "The synergetic integration of mechanical engineering with electronic and intelligent computer control in the design and manufacture of industrial products and processes".
Some of the major technical areas involved in mechatronics are:
Modeling and Design
Manufacturing
System Integration
Motion Control
Actuators and Sensors
Vibration and Noise Control
Intelligent Control
Micro Devices and Opto-Electronic Systems
Robotics
Automotive systems
Other applications
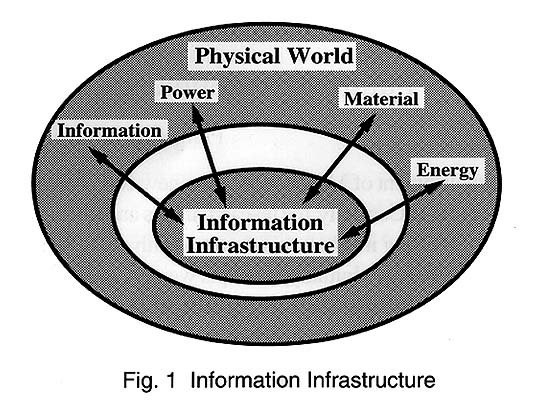
Maturing of these technical areas resulted in the establishment of Mechatronics as a new engineering discipline. Currently, the research in this area focuses on providing mechatronic systems with some form of intelligence. Initially, attempts were made to fuse Artificial Intelligence with Mechatronics. However, this approach proved not to be very successful. Mostly because Artificial Intelligence turned out not to fulfill due expectations. It appears that the key words to capture the nature of advanced intelligent mechatronics are "Fusion of Informatics and Mechatronics. This will involve areas and aspects such as:
- robots as interface between humans and machines
- use of human intelligence
- use of computers to assist human intelligence
- use of communication networks
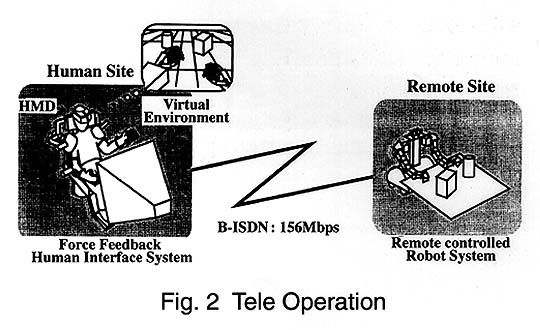
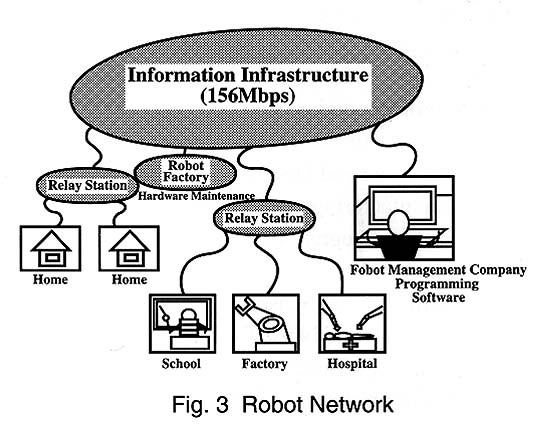
The initial excitement surrounding industrial applications of robots is now gone. At the university level, this is reflected in a low level of interest in the research in industrial robotics. There is also a noticeable decline in the use of industrial robots at the factory floor as a sheer replacement of human beings. What recently captured imagination of researches from academia and industry (especially in Japan) is the use of robots in our society. This interest has been amplified by the availability of very fast communication networks. This opens a possibility for the robotic and mechatronic systems to be connected to each other via fast computer networks to provide functions such as cooperation and data base sharing to assist people in their daily life. With this in mind, there have been attempts to use the Internet to control robots and establish interconnected robotic networks. Although the communication speeds of such networks are now limited to only some Mbps, it is expected that within the next ten years speeds of up to 156 Mbps will be supported by the information infrastructure based on ATM (Asynchronous Transfer Mode) and optical fiber.