


TOP > Topics > 2005 > Generating a shape model of the asteroid Itokawa using the Laser altimeter (LIDAR)
![]()
Generating a shape model of the asteroid Itokawa using the Laser altimeter (LIDAR)
The LIght Detection And Ranging sensor (LIDAR) or laser altimeter measures the time for a single pulse of laser light to travel between the HAYABUSA spacecraft and the surface of Itokawa, and back. Knowing the speed of light, a distance between the spacecraft and asteroid surface can be determined. By combining such LIDAR ranging data and images obtained by the optical navigation camera, the navigation system on board of the HAYABUSA spacecraft can accurately estimate its position relative to the asteroid.
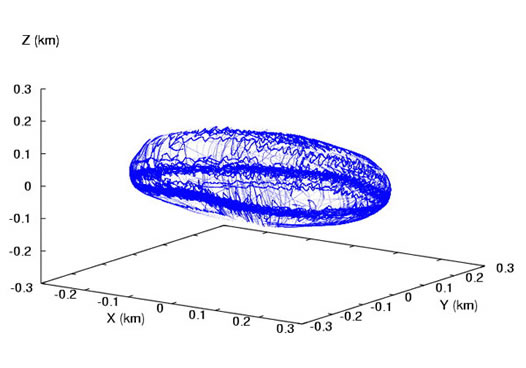
The LIDAR data will ultimately provide detailed surface topography and a 3-dimensional shape model of the asteroid. Such topography is obtained when the LIDAR’s laser encounters, for example, a depression on the surface of the asteroid. In this case the the range measured between the spacecraft and surface is slightly enhanced. On the other hand, if the LIDAR’s laser encounters a boulder, its measured range will become shorter. By compiling such information over the entire asteroid, a shape model of Itokawa can be obtained.
Figure shows a data cloud of LIDAR measurements on the surface of the asteroid since our arrival at Itokawa. These data are plotted on a shape model obtained using ground-based radar observations [1] generated prior to the arrival of HAYABUSA at Itokawa. As the HAYABUSA spacecraft is usually located on the equatorial plane of Itokawa, we have already obtained sufficient ranging data to model the asteroid’s equatorial shape. However, this is not the case at the poles, where few data exist.The best LIDAR-based models currently generate an elongated shape of Itokawa, with some thinning near one of its ends. This thinning provides some evidence for the characteristic neck of the asteroid, a conspicuous feature seen in the pictures taken by the HAYABUSA imager.
A full reconstruction of this neck feature is not yet possible with the LIDAR data because the low data density at the poles. We are currently continuing observations of the asteroid to further improve LIDAR coverage, which, with additional data analysis and optical navigation, will generate a better shape model of Itokawa.
[1] Ostro,S.J., Benner L.A.M., Nolan M.C., Magri C., Giorgini J.D., Scheeres D.J., Broschart S.B., Kaasalainen M., Vokrouhlicky' D., Chesley S.R., Margot J.L., Jurgens R.F., Rose R., Yeomans D.K., Suzuki S., and De Jong E.M. (2004) Radar observations of asteroid 25143 Itokawa (1998 SF36). Meteoritics & Planetary Science 39:407-424.
|

October 14, 2005