TOP > トピックス > トピックス > 2006年 > 「はやぶさ」探査機の状況について
![]()
「はやぶさ」探査機の状況について
「はやぶさ」探査機は、昨年11月に小惑星イトカワから離陸後、化学エンジンからの燃料漏洩と、同エンジンの機能が復旧できない状態が続き、12月8日に加わった燃料等のガス噴出によると思われる外乱により姿勢を喪失し、同日以来、地上局との交信が途絶していました。電力と通信を満たす姿勢条件は、向こう1年間に60〜70%の確率で両立することや、この間、探査機を地上局のアンテナビーム内にとどめて追跡できることが確認できていたため、2007年春に地球への帰還軌道に載せ、2010年6月に地球に帰還させる計画を採ることとしました。12月13日以来、救出運用に切り替え、通信の復旧にむけて努力を行うこととしてきたところです。(2005年12月14日JAXAプレスリリース)
その後、本年1月下旬に「はやぶさ」からの電波が受信されるようになりましたが、きわめて脆弱な交信状況に留まっていました。続いて2月末になって、ようやくテレメトリデータを取得することができ、探査機内部の状態が確認できました。さらに、3月6日に軌道をあらためて推定することができ、確度は依然低いものの、現在の位置・姿勢情報、ならびに現在の状況をおおまかに把握することができましたので、本日これまでの経緯と状況についてとりまとめることといたしました。
なお、今後引き続き、2010年6月の地球帰還に向けて努力していきます。
【復旧の経緯】
2006年1月23日に同探査機からのビーコン信号が受信されました。探査機の姿勢は12月8日に加わった外乱により、約90度ほども姿勢が変化したものと考えられ、同日に「はやぶさ」からの電波を確認した時点では、地球方向から約70度離れた方向を軸にスピンした状態で発見されたと考えられています。12月8日の姿勢喪失時には正方向に毎秒1度の角速度でスピンをしていましたが、同日発見時には、逆方向に毎秒7度の角速度でスピンした状態にあり、かなり大きな外乱を受けたと推定されています。
当初、探査機への指令(コマンド)は非常に通りづらい状況にありましたが、間欠的な指令を繰り返して送出する工夫などを行い、1月26日からは、探査機の自律診断機能が、地上管制センターからの質問に、送信周波数を変えて逐次回答するようになり、探査機の状態が僅かずつながら明らかになってきました。
その後に得られた情報も総合すると、「はやぶさ」は、12月8日の姿勢喪失後、太陽電池発生電力が極端に低下し、一旦電源が完全に落ちたもようです。搭載のリチウムイオンバッテリも放電しきった状態にあり、かつバッテリの中の一部のセルは準短絡状態となっていて、現在は使用不能の状態と考えられます。また、化学エンジンについては、すでに12月上旬には燃料をほぼ全量喪失した状態にありましたが、この間にさらに、酸化剤もあらたに漏洩したもようで、指示上は残量が全くない状態にあります。イオンエンジン運転用のキセノンガスは、12月に通信が不通に陥った時点の状態の圧力を保っており、残量は、約442〜44kgと推定されています。
地球への指向制御ができない場合には、ごく短期間で再度交信ができなくなる可能性もあったため、イオンエンジン駆動用のキセノンガスを用いて太陽方向(地球方向に近い)への姿勢変更制御を実施することにしました。2月6日には地上からの新たな姿勢制御プログラムの書き込みを行い、1日に2度ほどの速さで太陽方向に探査機のアンテナ方向を向かせるべく姿勢変更の運用を行ってきました。(図1) 3月4日には 太陽と探査機のアンテナ軸の角度が14度にまで縮小できました。(図2、図3、図4)
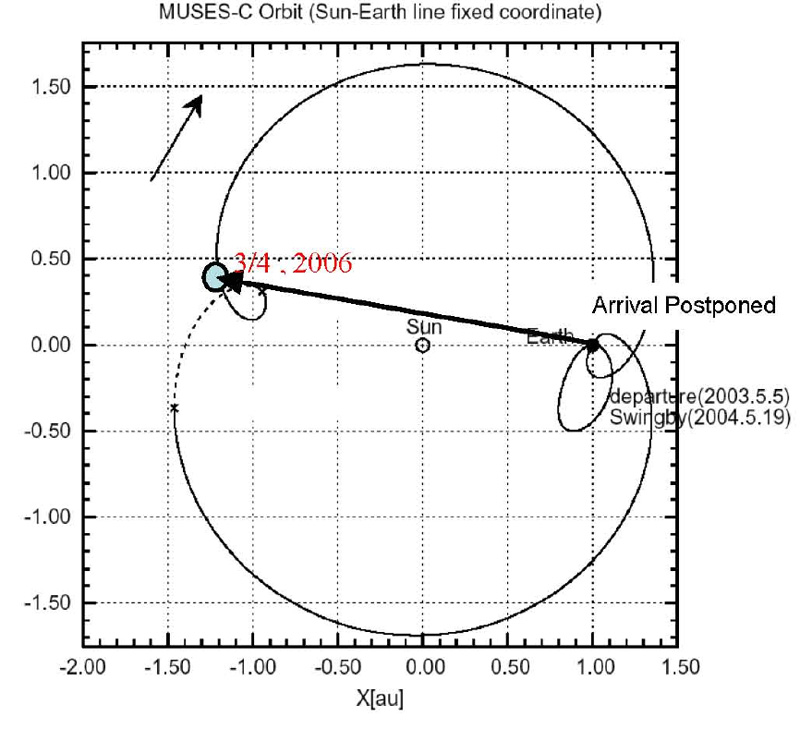
その結果、「はやぶさ」と地上局間の通信状況は徐々に改善され、2月25日には低利得アンテナを介して8bpsの速度ではありながらもテレメトリデータが復調され、3月1日には距離計測が実施できました。また、3月4日には、中利得アンテナにて、32bpsの速度でテレメトリデータが取得されるまでに好転しました。 3月6日には、得られた距離計測データとドップラ情報をもとに、「はやぶさ」探査機の軌道が決定でき、正確な探査機の位置・速度が3ヶ月ぶりに推定できました。「はやぶさ」は現在、イトカワから(概ねイトカワの進行方向に)約1万3千kmの距離にあり、相対速度毎秒約3mで飛行しています。現在の探査機の太陽からの距離は約1億9千万km、地球からの距離は約3億3千万kmです。(図5、図6)
【「はやぶさ」の今後の復旧計画 】
探査機内には、なお相当量の燃料ないし酸化剤が残留している可能性があり、軌道を確定して、異常状況への対策をもり込んだ探査機の姿勢制御ロジックの更新を終えたのち、ヒータを用いて探査機全体の温度を上昇させる「ベーキング」を実施する予定です。このベーキングにより、新たな燃料や酸化剤ガスの噴出が生ずるリスクがあり、最悪の場合には、再度の姿勢喪失などもありうるため、慎重に作業を進めたいと考えています(1〜2ヶ月間)。続いて、回収カプセルのベーキングを実施するとともに、回収カプセル内に試料容器を移送して蓋を閉めることを計画しています。さらに、これらに続いて、探査機内の温度を最も高くしうる、イオンエンジン運転状態での第2段階のベーキングを実施する予定で、イオンエンジンを1台ずつ起動させていき、最大3台同時運転の状態まで運用を行う計画です(数ヶ月間)。今年の後半から来年初めに、イオンエンジン運転の本格稼働を開始したいと考えています。
なお、探査機搭載のイオンエンジンや3軸姿勢制御のためのスタートラッカ、姿勢軌道制御コンピュータなどは、探査機全体の電源が一旦落ちたため、非常に低温の状態におかれたと推定されており、その機能が保たれているか懸念されるところです。現時点では、これらの機器の動作は確認にいたっておりません。
図1 姿勢変更の開始と変更方向 |
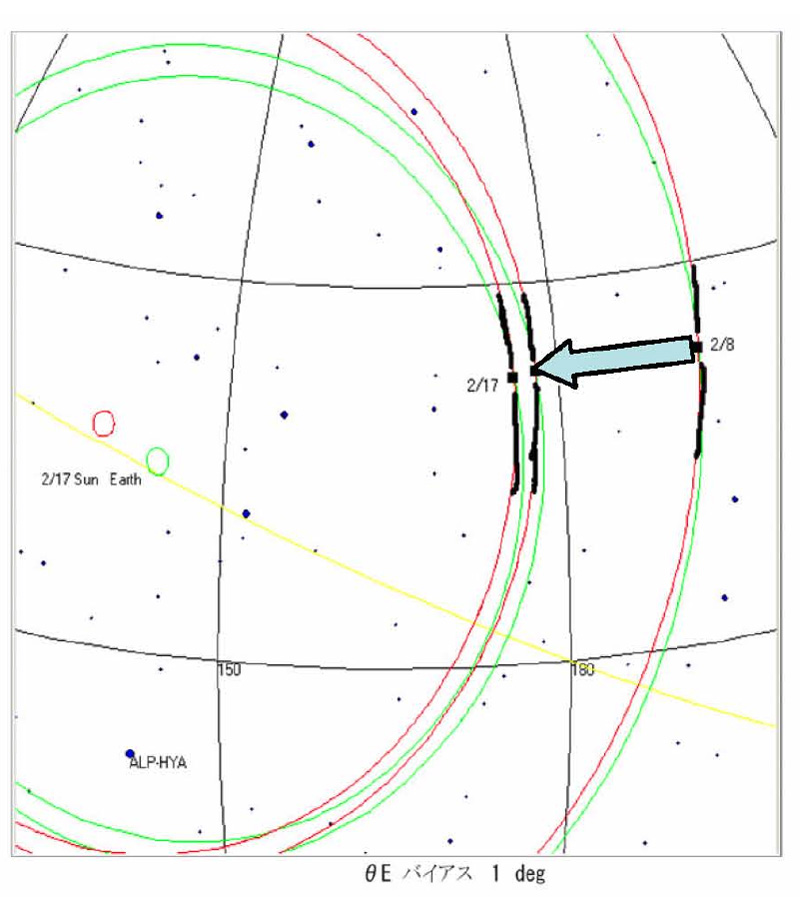
図2 2次元太陽センサの計測値に基づく姿勢決定方向 |
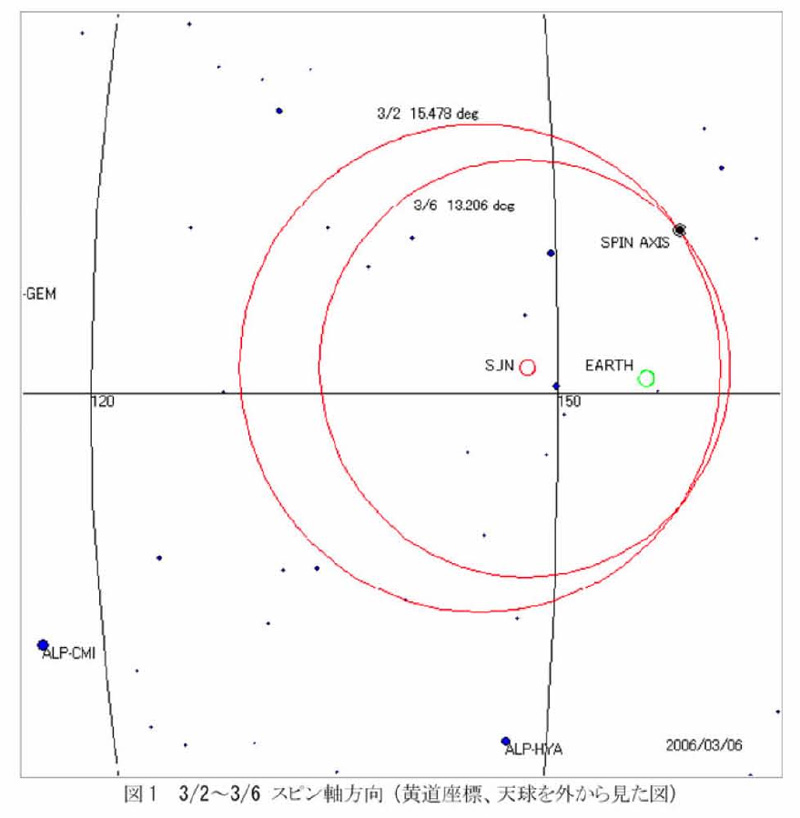
図3 太陽角と地球角の姿勢変更履歴 |
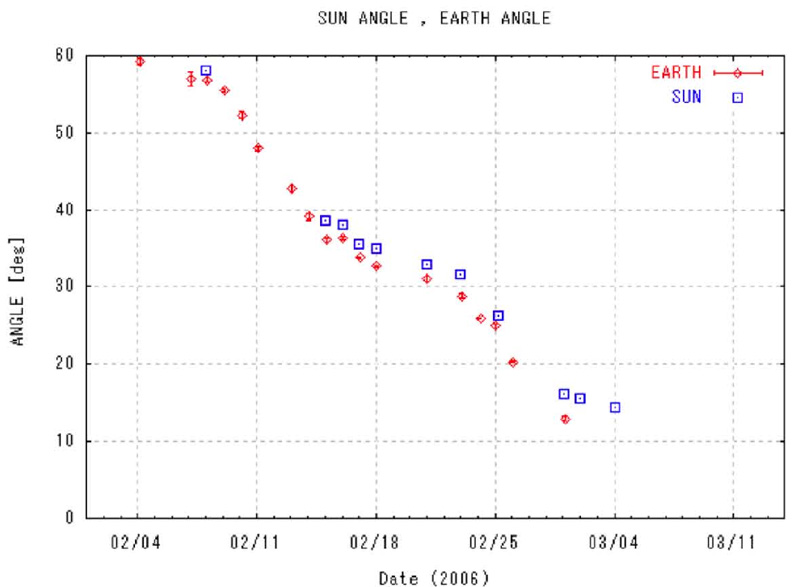
図4 1月20日0時(UTC)で受信できず、1月23日0時(UTC)で受信できる姿勢角範囲 |
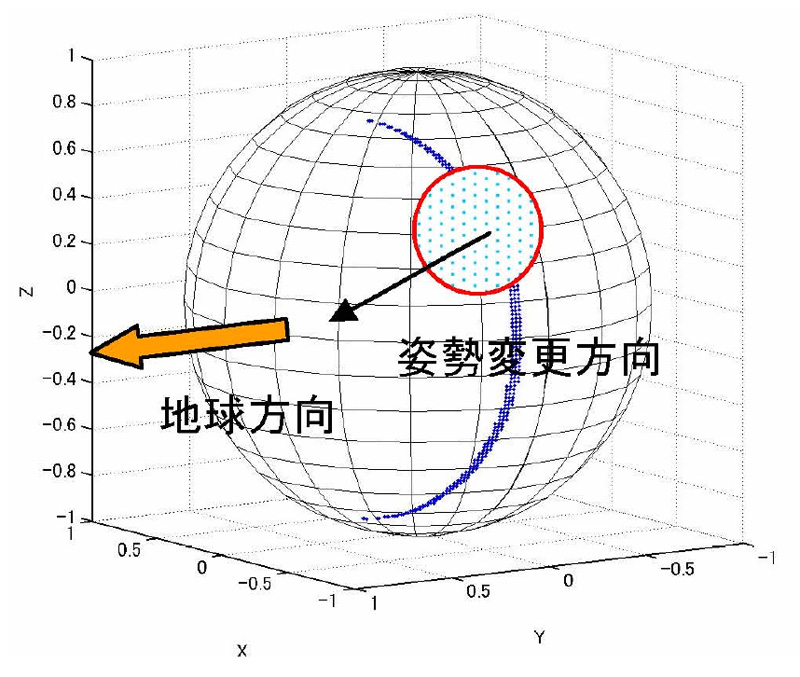
図5 慣性系での軌道 |
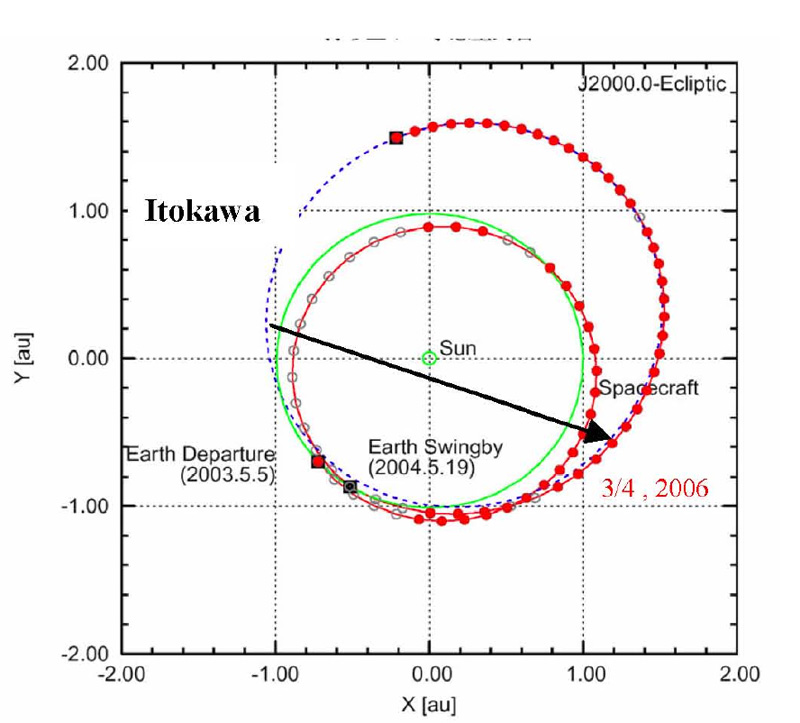
図6 太陽−地球方向を固定した座標系での軌道 |
2006年3月7日
![]()
最先端の宇宙科学に従事している研究者の、汗と涙と喜びに満ちた生の声をお届けするメールマガジンに、あなたも参加しませんか?詳しくはクリック!