このページの本文へ
ISAS内から検索
JAXA内から検索
TOP
>
レポート&コラム
>
ISASコラム
>
小さな衛星の大きな挑戦 惑星分光観測衛星の世界
>
第8回:望遠鏡の力を借りて、姿勢の制御を
(ISASニュース 2013年11月 No.392掲載)
本連載も第8回となりました。今回は、惑星分光観測衛星「ひさき」の姿勢制御システムについて述べたいと思います。これまで紹介してきた通り、「ひさき」の目的は惑星の分光観測です。そのためには、衛星の姿勢を精密に制御して望遠鏡を狙った場所に向け、惑星の極や赤道など観測したい場所を分光器と呼ばれる観測装置で正しく捉える必要があります。必要とされる指向制御の精度は、ざっと5秒角。
これは確かに厳しい要求ですが、今まで科学衛星で実現したことがない、というほどの精度でもありません。ただし、「ひさき」のコンセプトである標準バスを使って実現するとなると、話は違ってきます。5秒角の指向精度を実現するためにはさまざまな問題をクリアする必要がありますが、その一つに構体の熱歪みという問題があります。日陰・日照の変化、太陽方向と衛星姿勢の関係、地球からの太陽反射光の当たり方などによって、衛星内の温度は軌道上でさまざまに変化します。一般に暖められたものは膨張し、冷えたものは収縮しますから、温度の変動は衛星にわずかな歪み(熱歪み)をもたらします。特に、衛星各部の熱歪みにより、姿勢制御の基準となる恒星センサと望遠鏡光軸との関係にずれが生じると、大きな問題となります。5 秒角、という精度を論じる場合、この熱歪みは無視することができません。
フルオーダーメイドの衛星であれば、なるべく熱歪みの小さな材料で衛星をつくるといった対策があり得ます。しかしながら、このようなアプローチは熱歪みが小さい専用バスを特別に設計するということになりますから、「ひさき」で採用している標準バスという考え方にはなじみません。では、どうしたか。「ひさき」ではこの問題を、姿勢制御系と惑星観測望遠鏡とが協調する仕組みを設けることで解決しています。熱歪みの結果生じる誤差、つまり実際に望遠鏡で見えている方向と観測したい方向との誤差を、望遠鏡を制御する計算機から姿勢制御用の計算機へ、時々刻々送ってもらうようにしたのです。
この誤差を検出するための仕掛けが、視野ガイドカメラと呼ばれる装置です。望遠鏡が捉える惑星像は、最終的な観測装置である分光器の入り口(スリット)に比べて大きいため、スリットに入らない部分の像が分光器の入り口付近に映ることになります。視野ガイドカメラは、この“はみ出している”像を捉えて、望遠鏡制御用の計算機に送ります。計算機はその像の重心位置を計算し、およそ3秒に1回程度、姿勢制御系へ知らせてくれます。ですから、その重心位置の目標値をあらかじめ教えておけば、どのくらい姿勢を修正すればよいのかを姿勢制御系は知ることができる、というわけです。
このような協調をうまく実現するためには、望遠鏡制御用の計算機と姿勢制御用の計算機とが、きちんと連携する必要があります。そしてそれ以上に、観測機器の関係者と姿勢制御系の関係者とが、人が、密に連携して設計や試験や運用を行うことが重要です。そこでは、小規模衛星ならではの小回りの良さ、そして開発チームの連携の良さが、いかんなく発揮されてきたように思います。
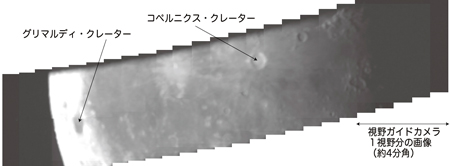
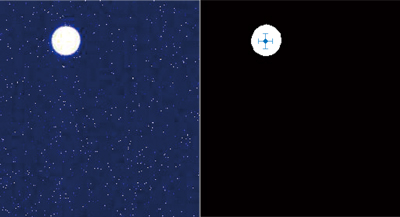
この原稿執筆時点では、まさにこの協調観測機能の軌道上チェックアウトが行われているところです。図1は、まずは大きな対象として、試しに月を捉えてみたときの視野ガイドカメラ画像です。映っている大きな月面クレーターは、衛星姿勢などの解析から、コペルニクスと呼ばれるクレーターだと考えています。図2は、別の日の運用で木星を捉えた際の視野ガイドカメラ画像と、重心位置計算の結果です。その後はさらに、明るい恒星を対象として、視野ガイドカメラからの重心位置情報に基づいて姿勢を制御し、恒星像を指定した位置に捉えることにも成功しています。まさに“望遠鏡の力を借りる姿勢制御” の中核となる機能が確認できた瞬間であり、姿勢制御系の関係者が一様に安堵と満足の笑みを浮かべた瞬間でした。
無事にファーストライトをお届けできる日は、確実に近づいています。どうぞご期待ください。
図1
視野ガイドカメラが捉えた月面とクレーターの画像
(本来映るはずのスリット像は合成により消去している)
図2
視野ガイドカメラが捉えた木星の像と画像重心位置の演算結果
(左)視野ガイドガメラ画像
(右)左の画像を2値化し、重心位置を検出した結果
(さかい・しんいちろう)
このページのトップへ
ISASコラム
前略、こちら地上系
再び宇宙大航海へ臨む「はやぶさ2」
宇宙・夢・人
惑星分光観測衛星の世界
誌上討論
イプシロンロケット 打上げへのカウントダウン
イプシロンロケットが拓く新しい世界
「あかつき」の挑戦
きぼうの科学
かぐや(SELENE)の科学
ロケットの電気屋さん
宇宙の○人
内惑星探訪
浩三郎の科学衛星秘話
科学観測気球 大空へ