TOP > レポート&コラム > ISASコラム > イプシロンロケットが拓く新しい世界 > 第8回:イプシロンロケットの誘導制御系

|
| (ISASニュース 2012年8月 No.377掲載) |

|
イプシロンロケットの誘導制御系
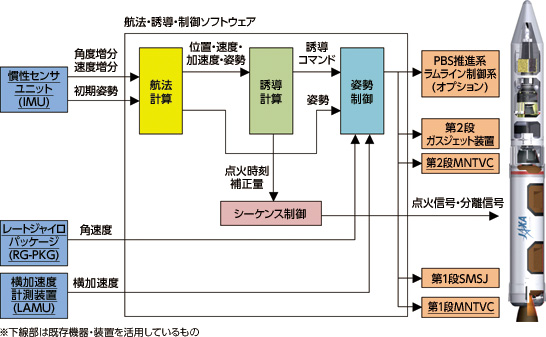
イプシロンロケットの誘導制御系も、開発コストの削減や開発期間の短縮のため、M-VやH-IIA/Bロケットなどで開発済みのコンポーネントを活用した構成となっています。誘導制御系の全体構成図を下に示します。
1段および2段推力飛行中のピッチ/ヨー制御は可動ノズル(MNTVC)装置により行います。また、その期間のロール制御とモータ燃焼終了後の3軸制御については、1段は固体モータサイドジェット(SMSJ)装置、2段はヒドラジンガスジェット装置により行います。
3段はコスト削減と軽量化のために固定ノズルスピン安定方式を採用しました。小型液体推進系ポスト・ブースト・ステージ(PBS)を搭載したオプション形態では、3段ステージの軌道誤差をあらかじめ低減する目的で、スラスタ1基によるラムライン制御(スラスタをスピン1回転につき1パルス噴射することによる姿勢制御)を行います。それによって、PBS燃料の削減が可能となります。また、PBSは50Nスラスタ8基を装備しており、増速と3軸制御に共通で使用することでスラスタ基数を削減しています。
誘導制御用のセンサとしては、ジャイロと加速度計を装備した慣性センサユニット(IMU)を搭載し、機体の誘導・制御に必要な各種信号を誘導制御計算機(OBC)に出力します。M-Vは誘導計算を地上で行って誘導コマンドを電波でロケットへ送信する電波誘導方式でしたが、イプシロンでは機上のOBCで誘導計算を行う慣性誘導方式を採用しています。また、1段にはレートジャイロパッケージ(RG-PKG)と横加速度計測装置(LAMU)を搭載し、1段フェーズの制御安定化や迎角の低減に使用します。
誘導アルゴリズム
イプシロンでは慣性誘導方式を採用していますが、固体ロケットフェーズではM-Vの誘導アルゴリズムをそのまま機上のソフトウェアへ搭載する形を採っています。具体的には、航法計算により導出された現在の位置・速度情報をもとに基準軌道に対する軌道誤差を求め、その軌道誤差から感度行列による数値計算もしくはテーブル方式を用いて誘導コマンド(姿勢補正量、点火時刻補正量)を計算します。
一方、低推力スラスタで構成されるPBS では、誘導開始時の誤差が大きく、燃焼時間が比較的長いが一度の燃焼フェーズでの速度増分は比較的小さいという特徴があります。そのため、PBS 誘導には、このような状況において有効な誘導解を得ることが可能であり、宇宙ステーション補給機「こうのとり」(HTV)での適用実績がある長秒時対応VIC(Velocity Increment Cutoff)誘導則を採用しました。具体的には、航法演算結果から軌道投入精度を確保するための誘導計算を行い、要求姿勢と動力飛行開始時刻、タイムツーゴー(PBS カットオフ時間)の算出を行います。
制御アルゴリズム
イプシロンではM-Vで実績のある固体ロケットに適したロバストな制御アルゴリズムを採用しています。一方、1段SRB-Aモータによる正弦波振動が過大となっているため、イプシロンの衛星分離部には振動を緩和する制振機構が装備されています。この制振機構のモードを考慮した制御系検討を行った結果、2段飛行中については1次モードのゲインまたは位相の安定化が必要であることが分かりました。これに対しては、制御則の次数を従来の6次から最大10次に変更する対策を行うことで、評定となる2段燃焼末期の安定化が可能となりました。
結び
簡単ではありますが、イプシロンの誘導制御系について紹介させていただきました。来年夏の初号機打上げに向け、今年秋には相模原キャンパスのC棟磁気シールド室にて姿勢制御系の健全性を確認するためのモーションテーブル試験を実施する計画なので、ご協力よろしくお願い致します。
(たむら・まこと)
|
|
|