このページの本文へ
ISAS内から検索
JAXA内から検索
TOP
>
レポート&コラム
>
ISASコラム
>
イプシロンロケットが拓く新しい世界
>
第4回:イプシロンの基本諸元と機体構成
(ISASニュース 2012年4月 No.373掲載)
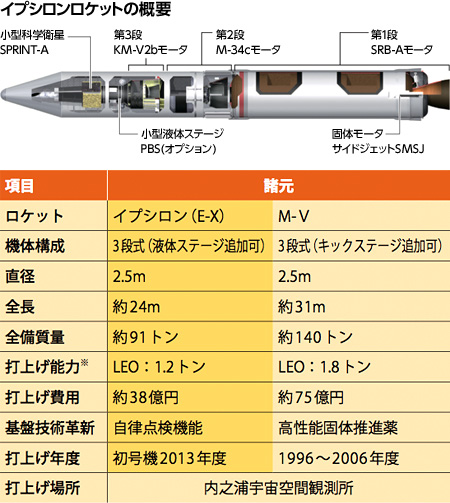
イプシロンロケットには、全段固体モータによる3段式の「基本形態」のほか、第3段の上にポスト・ブースト・ステージ(PBS)が追加された「オプション形態」が用意されています。PBSは、搭載された小型の液体推進系(M-Vの姿勢制御用エンジン程度のコンパクトなもの)と航法誘導制御系により液体ロケット並みの軌道投入精度を実現させるステージです。M-V型ロケットまでは衛星側で行っていた軌道調整をロケット側の輸送サービスに含めることによって、多様なミッションへの対応能力と利便性を高めて需要の拡大を図ろうというわけです。
全備質量約91トンのイプシロンは地球周回低軌道に1.2トンの衛星を運ぶ能力があり、同じ条件で1.8トンであったM-Vの3分の2の規模となっています。打上げ費用は、推進系や搭載機器の一部を基幹ロケット(H-IIA、H-IIB)と共通化すること、材料を最新化し製造プロセスを効率化すること、射場の設備と運用を革新的に簡素化することによって、M-Vのほぼ半分、機体の規模に対しても顕著な低コスト化が達成されます。また輸送性能の面では、1段モータ、2段モータの比推力がM-Vに比べて大きく向上するため、輸送効率(ペイロード比=衛星質量/ロケット全備質量)はM-Vをしのぐことになるのです。
※ LEO(高度 250km × 500km の地球周回低軌道)に換算した能力
イプシロンの開発では、抜本的な低コスト化を目指す次世代型最終形態の実現に向けて、段階的な開発戦略を取っています。第一段階では、M-V、H-IIAの開発で培われた技術を最大限に活用して、開発の期間、コスト、リスクを抑えつつ、近い将来の小型衛星ミッションからの要求に応えるE-Xを開発します。その1段には基幹ロケットのSRB-Aモータが共用され、2段、3段には「はやぶさ」を打ち上げたM-V型ロケット5号機の3段モータとキックモータの設計を踏襲するM-34cモータ、KM-V2bモータがそれぞれ採用されます。搭載機器については、アビオニクスの一部が基幹ロケットと共通化されるほか、第一段階における最大のポイントであり射場運用の抜本的な簡素化に貢献する「自律点検システム」が新規に開発されます。機体構造については分離機構を含めた多くのコンポーネントがM-Vの継承品や基幹ロケットからの流用品ですが、各段の機器搭載構造やフェアリングは新規開発になります。推進系では、1段燃焼中のロール制御と1段燃焼終了後の3軸制御を受け持つ固体モータサイドジェット装置、第2段に装備される姿勢制御用ガスジェットシステム、PBSの小型液体推進系が、M-VやH-IIAの技術を継承・発展させる形で新たに開発されます。
開発の第二段階においては、E-Xの開発と運用の成果を踏まえて地上支援設備を含めたシステム運用のさらなる簡素化や機体コンポーネントの抜本的な低コスト化を進め、さらに第一段階以降のニーズの変化にも対応する次世代型E-Iを開発します。E-Iは、第一段階の開発と並行して行っている要素技術研究の成果に基づいて、低コスト、高性能で利便性に優れた、新しい宇宙時代を切り拓く目的にふさわしい輸送システムになることでしょう。
イプシロンは、M-Vまでに確立された固体ロケットシステム技術を確実に引き継ぎ、さらにそれを効果的に発展させたロケットです。自律点検に代表されるシステムの革新コンセプトは、高頻度で多数回の運用を目指す将来の再使用宇宙輸送システムに必須のものでもあります。伝統ある日本独自の固体ロケットシステムは、イプシロンによって、従来の衛星打上げ手段としてだけでなく、次世代輸送技術を開拓するワークホースとしても役立つことになるのです。
(とくどめ・しんいちろう)
このページのトップへ
ISASコラム
前略、こちら地上系
再び宇宙大航海へ臨む「はやぶさ2」
宇宙・夢・人
惑星分光観測衛星の世界
誌上討論
イプシロンロケット 打上げへのカウントダウン
イプシロンロケットが拓く新しい世界
「あかつき」の挑戦
きぼうの科学
かぐや(SELENE)の科学
ロケットの電気屋さん
宇宙の○人
内惑星探訪
浩三郎の科学衛星秘話
科学観測気球 大空へ