このページの本文へ
ISAS内から検索
JAXA内から検索
TOP
>
レポート&コラム
>
ISASコラム
>
金星探査機「あかつき」の挑戦
>
第3回:探査機概要と軌道計画
(ISASニュース 2010年6月 No.351掲載)
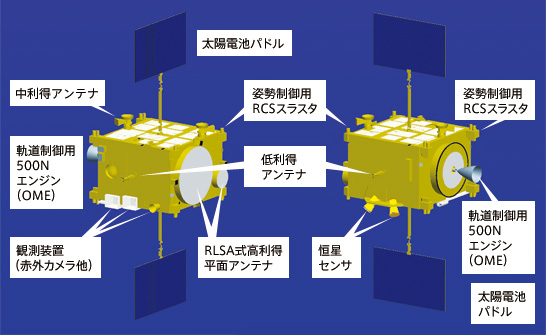
金星探査機「あかつき」は、中間赤外線から紫外線に至るさまざまな波長を持つカメラによって金星大気を観測します。図1は探査機の外観と主要機器の名称です。複数のカメラで金星を同時に撮像できるように、探査機の形状は箱形(直方体)とし、1つの面(カメラ面)にすべてのカメラを取り付けました。また、観測データを高速で地球に伝送するために、RLSA(ラジアルラインスロットアレイ)式高利得平面アンテナを新規に開発しました。金星は地球に比べ太陽に近く熱環境が厳しいため、熱を集めない平面型アンテナが有利だからです。そして、リアクションホイール(RW)による3軸姿勢制御によって、金星を撮像するときにはカメラ面を金星に向け、観測データを地球に伝送するときにはアンテナ面が地球を向くように、探査機全体の回転制御を行います。探査機の姿勢検出には、カメラと反対側の面に取り付けた恒星センサや太陽センサ、光ファイバージャイロなどを使用します。直方体6面のうち、上下2面は放熱面とし、探査機内部が高温にならないように内部の熱を効率的に逃がします。残り4つの側面には太陽光が直射するため、金色の断熱フィルムで覆い、熱の流入を防いでいます。上下2面の中心には太陽電池パドルが取り付けてあり、探査機本体の回転によらず太陽電池が常に太陽を向き、安定した電力が得られるように制御されます。また、金星周回軌道に入るときには、直方体の8つの頂点に取り付けた12機の姿勢制御用スラスタ(RCS)と1機の軌道制御用エンジン(OME)によって、軌道変更を行います。
図1
「あかつき」の外観と主要機器の名称
打上げ時には探査機全体が金色の断熱フィルムで覆われる。
地球から金星への軌道を選ぶとき、打上げ日時がとても重要です。地球と金星は共に太陽のまわりを公転しているため、地球を出発した後、金星にうまく会合できるタイミングを選ぶ必要があります。さらに、金星の公転軌道は地球の公転面に対し3度傾斜しているため、これによる上下の位置のずれも考慮しなければなりません。このような2つの惑星の運動を精密に計算しながら、より少ない燃料で金星に行ける軌道として2010年5月の打上げを選びました。
図2は黄道面に投影した「あかつき」の軌道です。地球を出発した「あかつき」は、一度地球公転軌道の外側に出て、少し時間を稼ぎます。そして、遅れてやって来る金星に接近するタイミングを調節します。金星までの飛行日数は約200日です。ちなみに、2010年の次の金星打上げのチャンスは2011年5月ですが、そこでは金星との接近条件を合わせるために太陽のまわりを1.5周回することになり、金星までの到着は約500日と長くなります。その次の2012年6月に地球を出発する場合は、太陽のまわりを2.5周回しないと金星に接近することができず、金星到着まで約800日もかかります。
図2
地球出発→金星到着までの軌道(図中黒実線)
地球出発後、一度地球軌道の外側に出て少し時間を稼ぎ、遅れてやって来る金星との接近条件を合わせている。地球出発から金星到着までの飛行日数は約200日。2010年12月初旬に金星周回軌道への軌道制御を行い、本格的な金星観測が始まる。
当初「あかつき」は5月18日朝6時44分14秒に打上げの予定でしたが、急激な天候悪化のため、打上げ直前に延期になりました。そして設定された次の打上げ日時は、5月21日朝6時58分22秒でした。このように打上げ時刻が秒まで決まってしまうのは、地球が自転しているからです。ロケットは地球の自転速度を効率的に利用するため、真東に飛行します。そして、今回の打上げでは、ロケットによって探査機を惑星間空間に直接分離、投入したので、ロケットの軌道が決まることによって探査機の地球脱出方向も決まります。その方向を金星に向かう軌道に乗せるために、地球の回転角を秒単位で決める必要があります。打上げが数分遅れるとその間に地球が回ってしまうため、ロケットは金星とずれた方向に飛んでいってしまいます。ちなみに、水星や金星など内惑星に行くためには早朝の打上げ、火星など外惑星に行くためには夕方の打上げになることが多いです。
打上げから約半年後の2010年12月初旬に、「あかつき」は金星を周回する軌道に入るための軌道変更を実施します。そして、いよいよ本格的な金星観測が始まります。
(いしい・のぶあき)
このページのトップへ
ISASコラム
前略、こちら地上系
再び宇宙大航海へ臨む「はやぶさ2」
宇宙・夢・人
惑星分光観測衛星の世界
誌上討論
イプシロンロケット 打上げへのカウントダウン
イプシロンロケットが拓く新しい世界
「あかつき」の挑戦
きぼうの科学
かぐや(SELENE)の科学
ロケットの電気屋さん
宇宙の○人
内惑星探訪
浩三郎の科学衛星秘話
科学観測気球 大空へ