Research
航法難易度を考慮した月惑星探査ローバの経路計画
Study on path planning for exploration rover considering navigation easiness
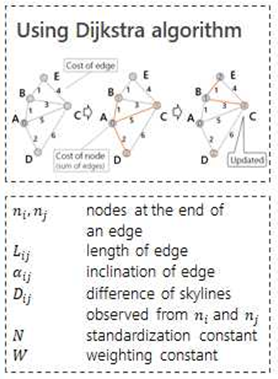
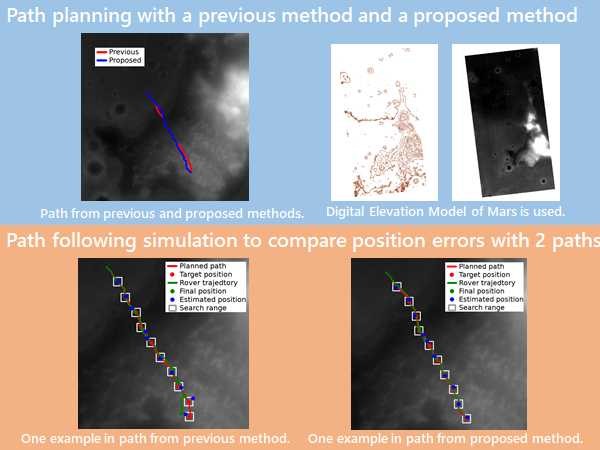
月惑星表面を直接探査する探査ローバは、自らの現在位置を計測し、目標地点までの移動経路を自律的に決定し、それを追従することが求められる。従来研究では、自己位置計測(航法)の研究と経路計画の研究は別個に行われており、航法難易度を考慮した研究例は少ない。本研究では、パノラマ画像から得られる地平線の形を用いて自己位置を推定するスカイライン法を自己位置推定法として採用する。スカイライン法による航法を容易にする最適な経路計画手法を提案する。図は、従来手法と提案手法によって計画された経路の例を示す。得られた経路においてローバ走行のシミュレーションをおこない、計画した経路とローバ軌跡の間の誤差を比較した。
Autonomous rovers are used for lunar and planetaryexploration. It is necessary that the rovers localize theirpositions, determine their routes and autonomously, andfollow the routes. In the past, localization and path planningare studied separately. There are few researches which takenavigation easiness into account in the path planning. Skylinealgorithm is one of methods for localizing with panoramicimages. In this method, extracted real skyline is comparedwith known digital elevation model to decide position. Below figures show the comparison between the routes planed by the conventional method and that of the proposed method. Simulation of skyline navigation was executed in the case of each path and error of rover trajectory was compared.