第6回
探査機の自律航法
〜自分の位置は自分で測る〜
橋 本 樹 明
惑星探査機は地球から遠いところを飛ぶため,地上から探査機と交信するには時間がかかります。たとえばお隣の惑星である火星でも,地球から最も遠い時期は約4億km離れていますので,電波の速度でも往復約40分かかります。また通信できるデータ量も限られますから,地上から惑星探査機を遠隔操縦することは困難で,あらかじめ「何時何分何秒に何をせよ」と覚え込ませておくか,探査機が自分で状況判断して行動するように作っておくしかありません。
今までの探査機は主に前者の方式をとってきました。この方式でも火星に着陸することはできましたが,目標とする地点に高精度に着陸させたり,軌道が正確に分かっていない小惑星に接近・着陸することはできません。そこで後者の機能である,探査機が自分で自分の位置を知って(自律航法と呼ぶ),目的とする地点まで行くことが必要になります。
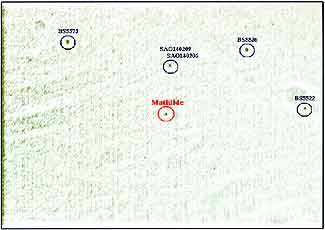
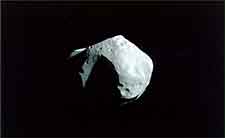
探査機が惑星に対する自分の相対位置を知る有力な手段は,百聞は一見に如かずのことわざ通り,搭載カメラで観測することです。遠いところからは,惑星も恒星と同じように光る点として見えるので,画像中から星カタログ(簡単に言うと,星座早見盤)に載っていないものを探せば,目当ての惑星を探すことができます。図1はNEAR探査機が小惑星Mathildeに接近しつつあるときの搭載カメラの画像です。NEARの場合は,この画像データを地上に送信し電波による計測結果(8月号の当欄参照)とあわせて探査機の位置を決めましたので,自律航法ではありませんが原理は同様です。惑星の方向がわかれば,そちらの方向に進めば良いわけです。で,ちゃんと図2のような近接写真が撮れました。
|
|
|---|
図1 小惑星Mathildeへの接近時の画像
(出典:http://www.jhuapl.edu/)
|
図2 小惑星Mathildeへの近接画像
(出典:http://www.jhuapl.edu/)
|
|---|
宇宙研の火星探査機「のぞみ」も,火星の衛星である Phobos,Deimos の近接撮像を計画しています。この場合は探査機自体の軌道を変えることはしませんが,搭載カメラの指向方向を搭載カメラからの画像をもとに搭載カメラの計算機によって計算していますので,一種の自律航法です。詳しくはISASニュース1997年8月号などをご参照下さい。
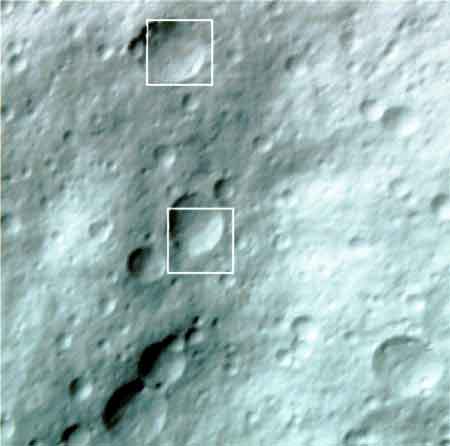
惑星に近づいた後は,その表面の画像からクレータ等の目印を選び出し,複数の目印の見える方向から,三角測量の原理で相対位置,姿勢を計算することができます。図3は画像処理技術を使って,クレータを抽出したシミュレーション例です。この画像は,アルゴリズムの検証のために,人工的に作った模擬惑星表面です。実際の惑星探査では,一枚の画像だけからでは十分な精度は得られないので,高度計などのほかのセンサと併用したり,探査機の軌道運動の方程式を使って複数画像からの情報を複合して処理したりしています。
 ISASニュース 2000.9 No.234
ISASニュース 2000.9 No.234