TOP > トピックス > トピックス > 2005年 > 「はやぶさ」の第2回着陸飛行の結果と今後の計画について
![]()
「はやぶさ」の第2回着陸飛行の結果と今後の計画について
「はやぶさ」は、平成17年11月26日に、イトカワ上のミューゼスの海付近への着陸および試料採取を目的とした第2回目の緩降下を試みました。
第2回の着陸・試料採取飛行では、第1回での実績をふまえ、シーケンスの継続性を確保するために以下の対応をとりました。
- ターゲットマーカを使用しないこと
第1回目のマーカがすでにミューゼスの海に展開されており、今回新たなマーカを投下する場合、2個のマーカを識別してしまう可能性がかなり高く、また一方では、確実にすでに投下済みのマーカが抽出・識別されることを保証することは難しく、今回は投下を行わないこととしました。なお、後解析のために投下済みマーカの検出記録は、モニタとして残すこととしました。 - 障害物検出機能を用いないこと
第1回の飛行では、Fan Beam Sensor (FBS) を最低感度に設定して使用しましたが、何らかの反射光が検出され、シーケンスの中断指令が出されました。第1回の飛翔後のデータ解析によっても、特段に大きな障害物は周辺には確認ができなかったため、今回は中断の判断信号としないこととしました。なお、これについても後解析のために検出記録をモニタとして残すこととしました。 - アライメント姿勢目標への収束性判定基準の緩和
基本方針として、一定の収束待ち時間(3分間)を経過するか、あるいは収束判定を抜けた場合に、次のシーケンスに進むこととし、シーケンスの中断がおきないように設定することとしました。 - レーザ高度計(LIDAR)からレーザ距離計(LRF)への切り替えの条件緩和
第1回目の飛行で、レーザ距離計のビームは高度35m の切り替え点で、1本が表面をはずしていました。これは着陸点の地形からすると異常ではありません。今回は、切り替え高度を下げることで、ビームのあたる数を増加させてシーケンスの継続性を高めました。 - 地形アライメント制御終了後の降下速度付与
第1回目のシーケンスでも、中断がなければ 2cm/sec の降下速度の印加が予定されていましたが、第2回目では、付与する速度を 4cm/sec とし、5分程度で表面に降下できるよう対応しました。
この結果、中断指令が発せられて、非常離陸移行する条件は、最終の垂直降下を開始した後では、
(1) 垂直降下中にレーザ距離計スポットがイトカワ表面をはずした場合、
(2) LRF への切り替え高度時点で、3本未満のビームしか表面を向いてない場合、
(3) 姿勢アライメント規準が、地球方向から 60度以上大きく逸脱している場合
だけとし、一旦 (3) を通過すると、サンプル採取し離陸する以外のシーケンスが発生しないように設定しました。
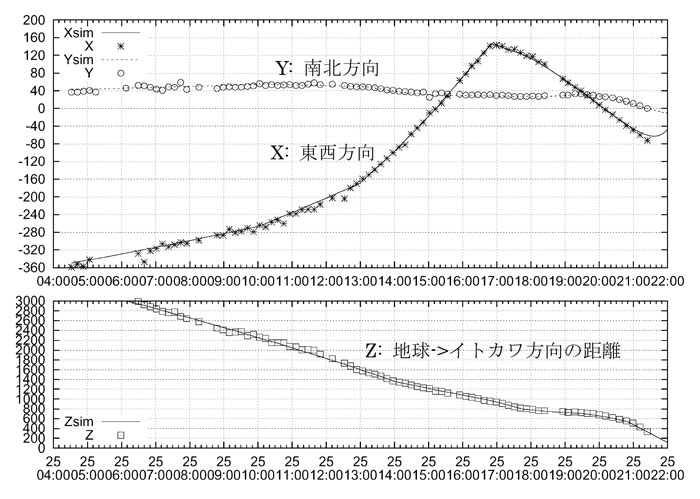
「はやぶさ」は、日本時間平成17年11月25日の午後10時頃にイトカワから高度約1kmの地点で降下を開始しました。降下経路は、第1回の着陸・試料採取飛行とほぼ同様で、ミューゼスの海の西方を目標して、画像にもとづく航法と誘導が順調に行われました。今回の降下点は、現在までに判明している状況によれば、ミューゼスの海のやや西方であったものと推定されます。接近状況を示す、準慣性座標系とイトカワに固定した座標系での軌道(資料−1)と、高度およびドップラー計測による降下中の高度と速度に関する状況を(資料−2)に示します。
今回は、すでに目標点近傍にターゲットマーカが展開されていたことから、搭載の自律航法誘導装置が目標を誤認する可能性があり、上述のようにあらたなターゲットマーカは投下しないことにしました。着陸にいたる垂直降下開始時の速度は毎秒12cm で、午前6時54分、高度 40m に到達した地点で、探査機自身が毎秒 6 cm の減速を行い、高度30m地点でレーザ高度計を近距離レーザ距離計(Laser Range Finder: LRF) に切り替え、日本時間午前7時00分頃、高度約7 m 付近で、地表面にならう姿勢制御のモードに移行しました。この時点で、探査機は自律シーケンスにより、地上へのテレメトリの送信を停止し、ドプラー速度の計測に有利なビーコンのみの送信に切り替えるとともに、送信アンテナを覆域の広い低利得アンテナに切り替えました。探査機上で記録されたデータを再生した結果によれば、「はやぶさ」はまもなく、着陸検知のために試料採取ホーンとの距離計測モードに移行し、下向きに毎秒約 4cmの速度を加えて着陸降下をさせました。その後「はやぶさ」は、試料採取ホーンの変形により着陸を検知して、2本のプロジェクタから弾丸(プロジェクタイル)を発射して、ただちに地表面に鉛直上方に秒速 50cm にて離陸を行いました。一連の動作は、地上局(NASA 深宇宙追跡局網(DSN))経由にて、確認を行うことができました。(資料−2)
「はやぶさ」が着陸を行った時点では、近距離レーザ距離計ビーム3本による距離は平均で約 7 m に維持され、「はやぶさ」は、その姿勢にてホーンの軸方向に、毎秒約 4cm の加速を行って、より確実なホーンの接地をはかりました。接地速度は、毎秒約 10cm と推定されています。(資料−2,資料−3)「はやぶさ」が地表面から離陸した際の姿勢は、その高利得アンテナの指向方向(探査機の+Z 軸方向)が太陽方向から、約7度であり、着地点の局所鉛直方向がほぼ反太陽方向向いて、ほとんど計画通りであったことが確認されています。離陸方向も、ほぼ太陽方向に近く、離陸後の姿勢と探査機上の各機器の動作はほぼ完全な状態に維持されました。近距離レーザ距離計は、地表面にならう制御を実施後、試料採取ホーンとの距離と反射受光量を計測するモードに切り替えられ、その受光量出力が所定の変化量を超えたこと、およびそれによりプロジェクタイル(弾丸)発射の指令が出されたことが、探査機上に記録された情報から判明しています。これらの結果、「はやぶさ」探査機は、試料採取装置が機能して試料採取を実施したことが確認できたと判断されます。
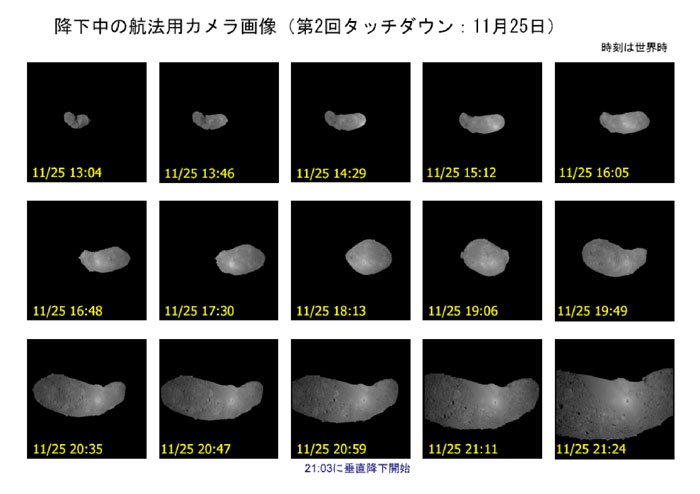
イトカワ表面に投下した88万人の署名入りターゲットマーカの画像を資料−4に、降下中の航法用カメラ画像(第2回タッチダウン:11月25日)を資料−5に示します。
「はやぶさ」は、今回の飛行により、地球圏内の月以外の天体において、着陸と試料採取に成功しました。とくに無人のロボット探査という点において、自律的な航法と誘導による画期的に新しい惑星探査の我が国独自の手法を実証できたといえ、深宇宙探査技術面で世界の第1線にたつことができたと考えています。今後の国内外の深宇宙探査および宇宙開発全体に、少なからず貢献できたと判断いたします。
今回の着陸・降下飛行にあたり、協力をいただいた米国航空宇宙局(NASA) の深宇宙追跡局網(DSN)にあらためて深く感謝いたします。
<資料>
(資料―1) イトカワへの接近、降下軌道(第2回)
11月26日に行われた「はやぶさ」の第2回の降下着陸飛行における、接近軌道を示します。
第1回と同様に、1a図が、軌道をほぼ慣性系に近い座標上で描いたもので、Z 軸方向(図上の下方向)が地球の方向です。また、1b図は、軌道をイトカワ固定座標系で描いたものです。運用中に軌道計画は更新されています。

図1a 第2回予定降下軌道と適応して定めた
実際の降下軌道 (準慣性座標系)
[画像クリックで拡大]
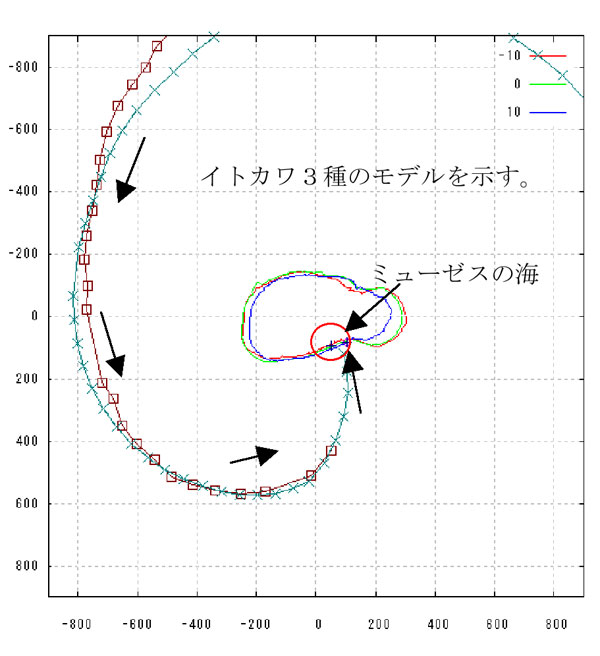
図1b 第2回予定降下軌道と適応して定めた
実際の降下軌道 (イトカワ座標系)
[画像クリックで拡大]
1c図は時々刻々の状況に適応して逐次更新された軌道計画に対して、実際に採られた軌道を重ねて表示したもので、各点の情報は、時々刻々圧縮されて送られてくる画像をもとに、表面地形から地上で推定した探査機位置を示しています。ほぼ完全に軌道計画に沿って、誘導が達成され、降下と接近が行われたことがわかります。
今回も、この図から、逐次更新された軌道計画に沿って、正確に誘導されたことがわかります。
図1c 第2回飛行における誘導航法のあらまし(準慣性系)
|
(資料―2) イトカワへの降下時の高度と降下率の履歴(第2回飛行)
2a図は、11月26日に、臼田局とDSN 局で計測されたドップラー速度履歴で、おおむね「はやぶさ」のイトカワへの降下速度を示しています。図から、「はやぶさ」が最終の垂直降下を開始した時点では、降下速度は毎秒約 12cm であったこと、また垂直降下中に探査機の判断で重力により加速される速度の増加分を抑えて、ゆるやかに減速を行っていたことがわかります。一方、2b図には、ドップラー速度情報を積分して得られた高度を更新して表示しています。
図2a 第2回「はやぶさ」降下中のドップラー計測値(降下率)
|
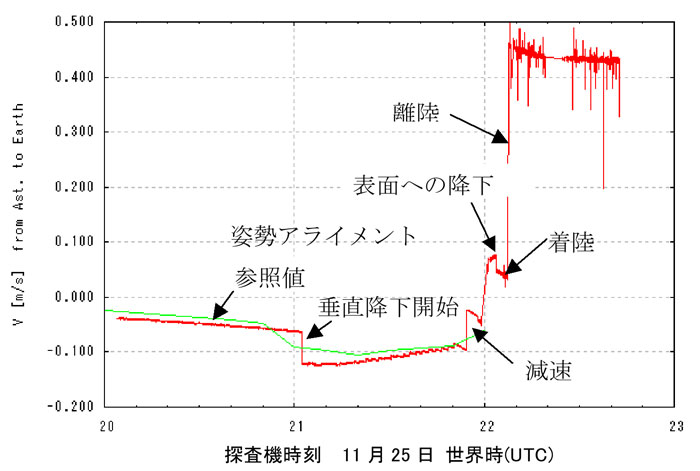
図2b 第2回「はやぶさ」降下中の高度履歴(または質量中心からの距離履歴)
|
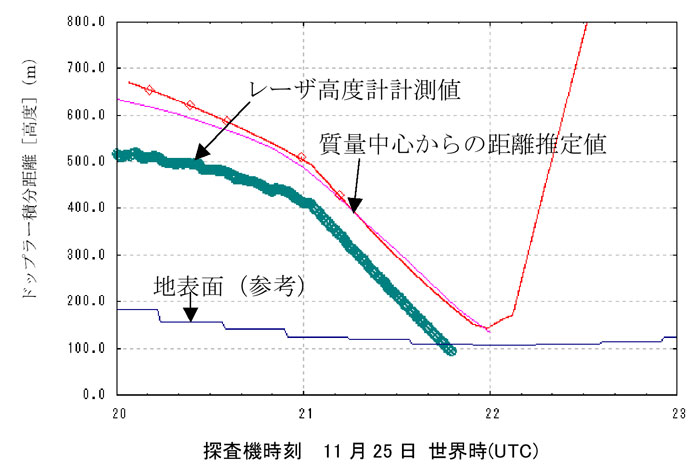
探査機は高度が十分に低い地点で、降下速度をほぼゼロとする操作が行われホバリングに移行し、地形にならう制御が行われたことがわかります。ドップラー速度情報から、探査機が地表面にならう制御後に表面にむけて増速を行ったことも確認でき、ほどなくして、地表面から離陸する増速が行われています。
(資料―3) 第2回目の飛行における、近距離レーザ距離計の計測履歴
3a図は、搭載の近距離レーザ距離計の計測値を示したものです。
図3a 第2回着陸時第2回着陸時の近距離レーザ距離計の計測値履歴(単位:m)
|

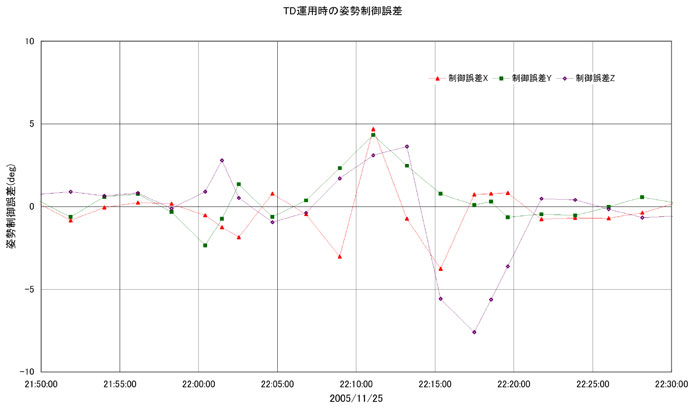
図3b 第2回着陸時の姿勢制御誤差の履歴(単位:度)
|
この距離計の情報により、高度約7m 付近で地形にならう制御への移行が行われた行われ、距離がほぼ一定に制御されたことが確認できます。
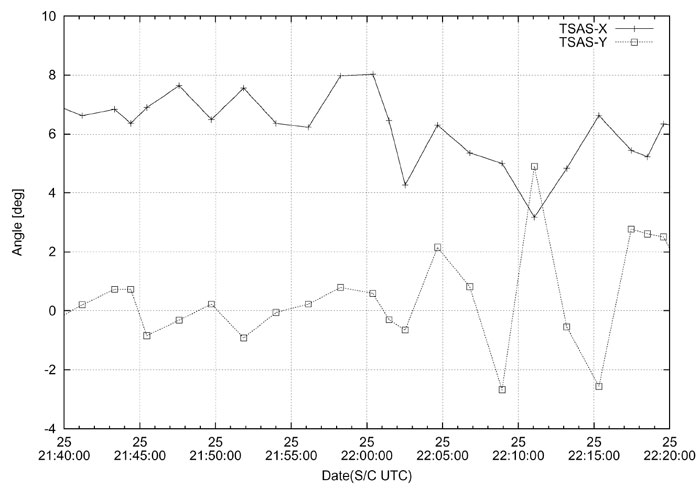
3c図は、接近からサンプリングを含み、離陸までの間の2次元太陽センサの計測値を示したものです。接地時刻の日本時間 07:07 (世界時 22:07) 付近で変動がみられますが、変動幅は 4 度程度にとどまっており、このことは、試料採取ホーンの変形が、太陽電池パネルの地表面への接触がなく実施できたことを示す間接証拠であるといえます。
図3c 第2回着陸時の2次元太陽センサ角度履歴(単位:度)
|
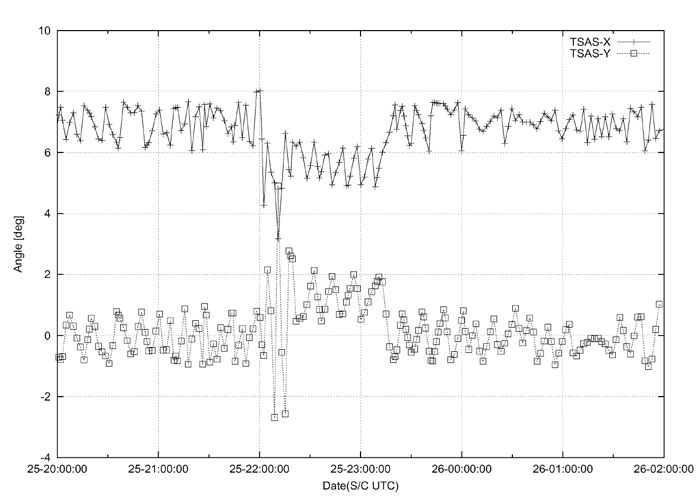
図3d 第2回着陸時の2次元太陽センサ角度履歴(単位:度)
|
(資料―4) イトカワ表面に投下した88万人の署名入りターゲットマーカ
「はやぶさ」は、11月20日に投下したターゲットマーカを11月26日のタッチダウン降下中に撮像した画像で、確認することができました。このターゲットマーカには、149カ国88万人の名前が刻まれており、イトカワ表面に無事着地していました。左側の画像が11月20日午前4時58分に投下前に撮像した「ミューゼスの海」で、右側の画像が11月26日午前6時24分に撮像した画像です。赤丸の中で白く光っているのが、88万人の署名入りターゲットマーカです。
左:11月20日午前4時58分撮像 右:11月26日午前6時24分撮像
|

ターゲットマーカ(拡大画像)
|

(資料―5) 降下中の航法用カメラ画像(第2回タッチダウン:11月25日)
図5 降下、接近中の画像
|

2005年11月29日
![]()
最先端の宇宙科学に従事している研究者の、汗と涙と喜びに満ちた生の声をお届けするメールマガジンに、あなたも参加しませんか?詳しくはクリック!