TOP > トピックス > トピックス > 2005年 > 「はやぶさ」の第1回着陸飛行の結果と今後の計画について
![]()
「はやぶさ」の第1回着陸飛行の結果と今後の計画について
「はやぶさ」は、2005年年11月20日に、着陸および試料採取を目的に、第1回目の緩降下を試みました。以下は、取得されたデータとその経緯に関する速報です。
「はやぶさ」は、日本時間2005年11月19日の午後9時にイトカワから高度約1kmの地点で降下を開始し、接近から降下、および垂直降下にいたる誘導と航法は順調に行われ、翌20日の午前4時33分に地上からの指令で最終の垂直降下を開始して、ほぼ目的とした着地点に「はやぶさ」を緩降下させることに成功しました。目標点との誤差は、現在解析中ですが、おおむね30m 以内であったものと推定されています。接近状況を示す、準慣性座標系とイトカワに固定した座標系での軌道を(資料−1)に掲げます。また、高度およびドップラー計測による降下中の高度と速度に関する状況を(資料−2)に示します。
垂直降下開始時の速度は毎秒12cm でした。午前5時28分、高度54mの地点に到達した時点で、ターゲットマーカの拘束解除の指令を出し、同30分、高度40m の地点で、探査機自身が毎秒 9cmの減速を行って、同マーカを切り離しました。同マーカが分離されて降下したことは、画像(資料−3)や減速時の探査機の降下速度の値から確認されています。同マーカは、イトカワ表面上のミューゼスの海の南西側(画像上では右上側)に着地したものと推定されます。
「はやぶさ」はその後、高度35m地点でレーザ高度計を近距離レーザ距離計(Laser Range Finder: LRF)に切り替え、高度25mの地点で、降下速度をほぼゼロにして浮遊状態(ホバリング)に入りました。その後、「はやぶさ」は自由降下を行い、日本時間午前5時40分頃、高度17m付近で、地表面にならう姿勢制御のモードに移行しました。この時点で、探査機は自律シーケンスにより、地上へのテレメトリの送信を停止し、ドプラー速度の計測に有利なビーコンのみの送信に切り替えるとともに、送信アンテナを覆域の広い低利得アンテナに切り替えました。
以降、実時間での搭載各機器の状態の把握はできませんでしたが、探査機上で記録されたデータを再生した結果によれば、「はやぶさ」はまもなく、障害物検出センサが何らかの反射光を検出したため、降下の中断が適当と自らが判断して緊急離陸を試みたもようです。探査機自身で離陸加速を遂行するためには姿勢に関する許容範囲が設定されており、この時点では探査機の姿勢がその範囲の外にあったため、結果として安全な降下の継続が選択されました。その結果、「はやぶさ」は、着陸検出機能を起動しませんでした。
当初、「はやぶさ」は表面への着陸を行っていなかったと判断されていましたが、再生したデータによれば、「はやぶさ」はその後ゆるやかな2回のバウンドを経て、およそ30分間にわたりイトカワ表面に接触を保って着陸状態を継続していたことが確認されています。これは、近距離レーザ距離計の計測履歴や、姿勢履歴データから確認することができます。(資料−4)
この事象が生じたのは、米国航空宇宙局(NASA)の深宇宙局(DSN)から臼田局への切り替えの間であったため、地上からのドップラー速度計測では、これを検知できませんでした。2回の接地時の表面への降下速度は、毎秒約10cmでした。現時点では探査機への大きな損傷は確認されていませんが、ヒータセンサの一部に点検を要すると思われる項目があるもようです。
「はやぶさ」は、日本時間午前6時58分に地上からの指令で緊急離陸を行うまで、その間安定に着地を継続しました。試料採取のための着陸検出機能は、上記の理由で起動されていなかったため、実際に着陸が行われていながら、プロジェクタの発射は行われませんでした。着陸した姿勢は、サンプラーホーンと探査機の+X軸側下面端または太陽電池パネルの先端を表面に接した形態であったと推定されています。「はやぶさ」は、小惑星から離陸した最初の宇宙船となりました。
「はやぶさ」は指令を受け離陸した後、通信回線の不確実な状況と機上の計算機間の制御権の競合に起因するセーフモードに移行し、これを立て直すために、11月21,22日の両日を要しました。このため、本日現在でも、20日に記録したデータの再生はなお中途の段階にあり、なお今後の解析でさらに新たな事実が出てくる可能性もあります。現時点では、着地点の詳細画像や、正確な着地点を推定するための画像の再生にはいたっていません。「はやぶさ」は、現在、再度の着陸・試料採取シーケンスを開始できる地点に向かって飛行しているところです。日本時間の11月25日夜から降下を開始できるかどうかは微妙であり、明日(11月24日)の夕方に改めてお知らせいたします。
なお、当日の着陸・降下飛行にあたっては、米国航空宇宙局(NASA)の深宇宙追跡局網(DSN)の使用を基本とさせていただきました。バックアップ局の確保などを含めて、協力をいただいたNASA およびに DSN にあらためて深く感謝いたします。
<資料>
(資料―1) イトカワへの接近、降下軌道
11月20日に行われた「はやぶさ」の降下着陸飛行における、接近軌道を示します。 1a 図は、軌道をほぼ慣性系に近い座標上で描いたもので、Z 軸方向(図上の下方向)が地球の方向です。1b 図は、軌道をイトカワ固定座標系で描いたものです。運用中に軌道計画は更新されていますが、事前の計画に十分近い軌道を飛翔できたことがわかります。

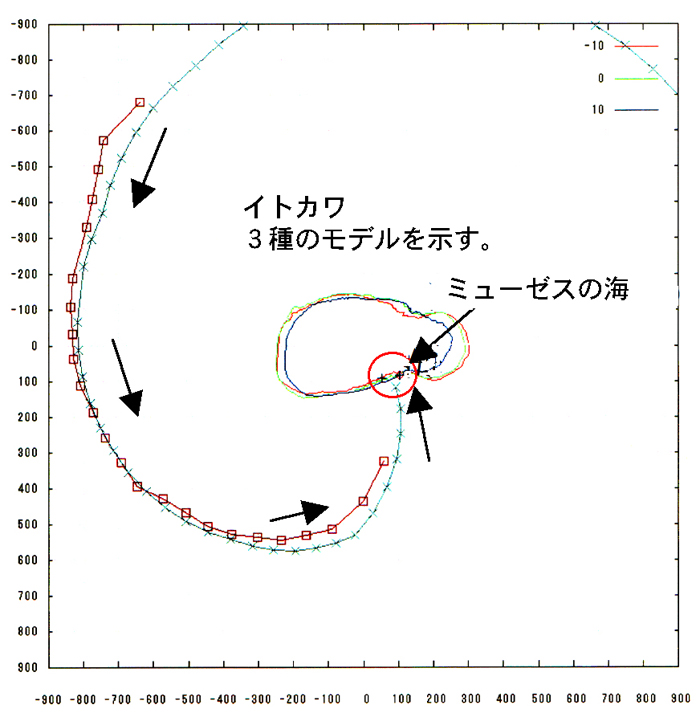
1c 図は 1a 図に対応するもので、時々刻々の状況に適応して逐次更新された軌道計画に対して、実際に採られた軌道を重ねて表示したものです。各点の情報は、時々刻々圧縮されて送られてくる画像をもとに、表面地形から地上で推定した探査機位置を示しています。ほぼ完全に軌道計画に沿って、誘導が達成され、降下と接近が行われたことがわかります。
図1c 誘導航法のあらまし (準慣性系)
|

距離が遠い地点では、この表面地形から推定される位置のばらつきは大きくなりますが、高度が約1km を下回ると、ほぼ十分に安定した情報が得られています。 この図から、逐次更新された軌道計画に沿って、正確に誘導されたことがわかります。
(資料―2) イトカワへの降下時の高度と降下率の履歴
2a 図は、臼田局とDSN 局で計測されたドップラー速度履歴で、おおむね「はやぶさ」のイトカワへの降下速度を示しています。 図から、「はやぶさ」が最終の垂直降下を開始した時点では、降下速度は毎秒約 12cm であったこと、また垂直降下中に探査機の 判断で重力により加速される速度の増加分を抑えて、ゆるやかに減速を行っていたことがわかります。
2b 図は、ドップラー速度情報を積分して、適切なタイミングで地形から推定された情報で高度を更新して表示したものです。 ほぼ高度(イトカワの質量中心からの距離)を与えています。図中の緑の線(点列)は、レーザ高度計の計測値(イトカワの 表面からの高度)を示しています。ドップラー速度情報とを同時にみることで、各イベントが発生した時点の状況をおおまか に把握することができます。
図2a 「はやぶさ」降下中のドップラー計測値(降下率)
|
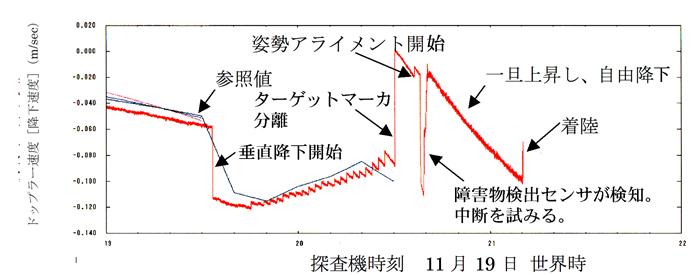
図2b 「はやぶさ」降下中の高度履歴(または質量中心からの距離履歴)
|
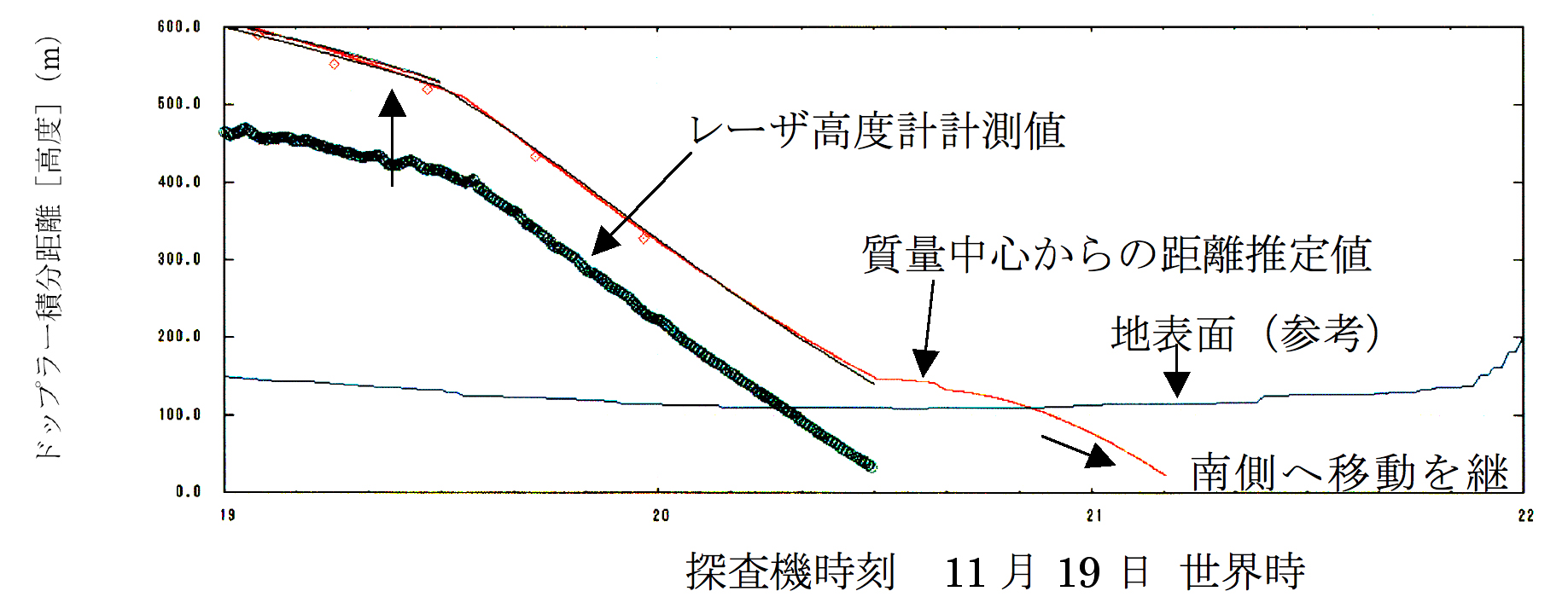
探査機がターゲットマーカを分離した時点は、高度が計画通りに約40m 地点であったこと、降下速度は毎秒約 9cm であったことがわかります。また、高度が約20 m の地点で降下速度をほぼゼロとする操作が行われホバリングに移行したことや、高度17m 地点でなんらかの姿勢変更が行われて、地形にならう制御が行われたこともわかります。(後述)
ドップラー速度情報からは、その後、ほぼ時間に線型に降下速度が上昇していることがわかりますが、これは地表面付近でのイトカワの重力(正確には重力の地球視線方向への成分)によるものです。ドップラー速度を積分した視線方向への「はやぶさ」の移動量は数十m に達していて、これは当初着陸予定地点の地表面位置よりも下方にあたることになりますが、これは、探査機が傾斜したミューゼスの海の表面に沿って南側(図3a の上側)に移動した結果であると考えられています。
日本時間午前5時40分(世界時21時40分)のドップラー速度の増加は、後述するイトカワ表面への着地に伴うものです。
以降は、臼田局へ引き継がれたために、しばらくの間、ドップラー速度情報は取得できませんでしたが、近距離のレーザ距離計の情報などにより、その後の運動についても、一部、解析を行うことができています。
(資料―3) 分離された署名入りのターゲットマーカと、その機上での追尾状況
ターゲットマーカは、探査機から相対速度、毎秒 9cm で分離されました。イトカワ表面との相対速度は毎秒約 9cmでした。投下された地点は、ミューゼスの海の南西側(図3a 画面上ではほぼ真下)にあたります。
ターゲットマーカは、はねかえりが極端に少ないよう、アルミ製球殻内に微小な高分子材料でできた微小球を適度に充填させて多重衝突を起こさせ、それによりエネルギ消散率を高める設計がされており、地上においても、無重量落下実験施設にて真空条件下でくりかえし試験を行い、その低反発性を実測して確認して開発されたものです。
ターゲットマーカは、はやぶさ搭載のフラッシュランプで2秒間隔で照射され、照射されずに撮影された画像との差の画像を取得することで、小惑星(背景)像を相殺させてターゲットマーカだけが抽出されるよう機上の画像処理が行われました。
図3a 「はやぶさ」から切り離された、署名入りターゲットマーカ |

図3b ターゲットマーカの機上での追跡処理状況
|
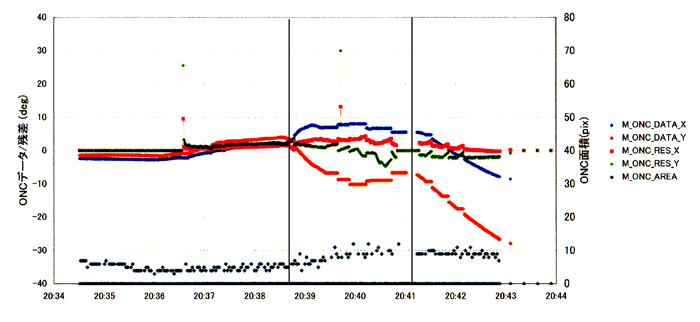
切り離されたターゲットマーカは、日本時間午前5時33分頃から、「はやぶさ」によって機上の計算機でその位置を認識・追跡されはじめました。その後、ホバリングへの移行をはさみ、世界時20時39分(日本時間午前5時39分)前まで順調に追跡されました。(上の図で RES_X, RES_Y が追尾制御の誤差を示しています。)
「はやぶさ」は、続いて、予め決められたオフセット量を考慮して、ターゲットマーカ上空へ自らを誘導する、実際の制御を開始し、正常にこれが実施されたことが確認されています。午前5時41分頃には、障害物検出センサーが何らかの反射光を検出し、この制御を中止しましたが、上の図で示すように、その後も同マーカの位置計測は正常に継続されました。これにより、機上での画像の自動処理と、それを用いた探査機のターゲットマーカ上空への位置制御の両方が正常に機能したことが確認されました。
(資料―4) 近距離レーザ距離計の計測履歴
4a 図は、搭載の近距離レーザ距離計の計測値を示したものです。
図4a 着陸時の近距離レーザ距離計の計測値履歴(D ビームのみ。単位:m)
|

図4b 着陸時の姿勢制御誤差の履歴(Y 軸のみ。単位:度)
|

距離計の情報が示すことは、一旦17m 付近で地形にならう制御への移行が行われた際に、 やや高度を上げる現象が見られ、その後予定どおりに重力による自由落下が行われて、日本時間の午前6時10分頃に距離がほぼ ゼロとなって、着陸が行われたことです。それ続いてさらにもう1回のバウンド現象がみられた後、高度をほぼゼロに保ったまま 推移した期間が約30分間持続しました。
図4c 着陸時の化学エンジンの通算噴射時間の履歴(単位:秒)
|
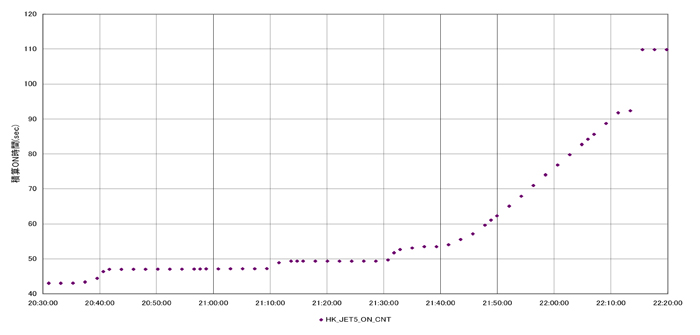
4c 図は、この間の化学エンジン通算噴射時間の履歴を示したものです。これらから、1) 世界時20時40分(日本時間午前5時40分)頃、2) 同21時10分(同6時10分)頃、3) 同21時30分(同6時30分)頃に、大きな姿勢トルクが作用し、これを補償すべく噴射が集中したことがわかります。第1回目は、地形アライメント制御の開始に対応していますが、第2回、第3回目の点の様相は、近距離レーザ距離計の計測値の履歴からもわかるように、着陸によってもたらされたことがわかります。
世界時21時40分(日本時間午前6時40分)頃から同22時10分(同7時10分)すぎまでの約30分間は、化学エンジンが一定の頻度で特定方向に噴射を繰り返しているとともに、LRF 計測距離も十分に小さく、また姿勢角が安定に保たれていることから、「はやぶさ」の姿勢は着地した姿勢をそのまま維持していたことがわかります。化学エンジンは、1秒間に15ミリ秒だけ噴射を行うようプログラムされていたため、一旦、地表面に着陸してしまうと、重力にうちかって離陸ないし姿勢変更を行う能力はなく、噴射可能な時間いっぱいの噴射を行っていました。(なお、離陸時は連続噴射を行います。)
これを図2a, 2b と合わせて解釈すると、「はやぶさ」は着地した姿勢を保ったまま、イトカワ表面に静止していたことがわかります。姿勢の履歴から、この区間では、ほぼイトカワの自転に一致した姿勢変化が計測されており、着陸して保たれた姿勢が、ほぼイオンエンジン側をイトカワのほぼ東方向(3a 図画像上で左方向)として、安定な姿勢をとっていたものと推定されます。

2005年11月23日
![]()
最先端の宇宙科学に従事している研究者の、汗と涙と喜びに満ちた生の声をお届けするメールマガジンに、あなたも参加しませんか?詳しくはクリック!