TOP > レポート&コラム > ISASコラム > きぼうの科学 > 第15回:日本初の無人宇宙船 宇宙ステーション補給機(HTV)
![]()
| (ISASニュース 2010年1月 No.346掲載) | ||||
|
||||
|
||||
|
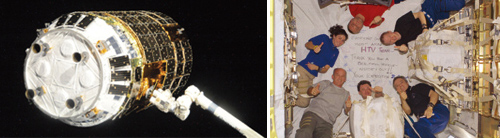
HTVは、9月11日午前2時1分46秒にH-IIBロケットで打ち上げられ、当初の計画より低い高度で飛行しているISSへ延べ8日間かけて、地上からの支援のもと、自動で高度と距離を合わせるランデブー飛行を行いました。なお、この期間に、ISSへの最終接近の許可を得るため、退避する機能(アボート機能)を軌道上で実証しました。最終接近では、まず「きぼう」に搭載した近傍通信システム(PROX)と通信を行いながらGPSによる相対航法でISSの約500m下に投入し、その後、ランデブーセンサのレーザレーダにより「きぼう」に取り付けられた反射器との距離を計測しながら、ゆっくりISSに向かって上昇しました。途中、ISSの宇宙飛行士からのコマンド受信機能の確認などを行いながら、最終的に「きぼう」の直下約10mに速度差2mm/s以下でほぼ相対的に停止しました。そして、9月18日午前4時51分にISSロボットアーム(SSRMS)により把持され、ISSに取り付けられました。その後、43日間係留され、SSRMSや宇宙飛行士により輸送物資の搬出と廃棄物資の搬入が行われ、10月31日午前2時32分にSSRMSにより放出された後、3回の軌道離脱マヌーバを実施し、11月2日午前6時25分に大気圏に再突入し、一部はニュージーランドの東方沖の所定の海域に落下しました。
今回の飛行では、JAXAの超伝導サブミリ波リム放射サウンダ(SMILES)とNASAのHREP(Hyperspectral Imager for Coastal Ocean[HICO] / Remote Atmosphere and Ionosphere Detection System[RAIDS] Experimental Payload)が曝露パレットに搭載されて打ち上げられました。この2つの曝露部実験装置は、SSRMSと「きぼう」のロボットアーム(JEMRMS)を使って、所定の曝露部のポートに取り付けられ、予定通り観測が開始されています。与圧部には、食糧や衣料以外に、船内実験室で使われる実験試料、「きぼう」の交換部品や子アームなどが搭載されました。さらに打上げ直前には、低温を保つ必要があった植物の種子もレイトアクセスカーゴとして、HTVがフェアリングに収納された状態で積み込まれました。すべての物資が、計画通りISS側に運び込まれています。 HTV技術実証機は、すべてのミッションを完了しましたが、現在は運用結果の詳細評価を行って次号機以降への反映事項を検討しています。今後2015年まで年1機程度の打上げ・運用が計画されており、ISSへの着実な物資補給を通して、「きぼう」での科学の発展に貢献する予定です。特にスペースシャトルの退役以降は、大型与圧ラックや曝露搭載品を輸送できる唯一の補給船となります。今後もHTVの運用を通して、将来の有人宇宙活動に必須となる技術の蓄積を図っていき、回収機能の追加や回収機への発展も検討していきます。 |