Research
画像を用いた探査機の航法誘導
Image-based navigation and guidance of spacecraft
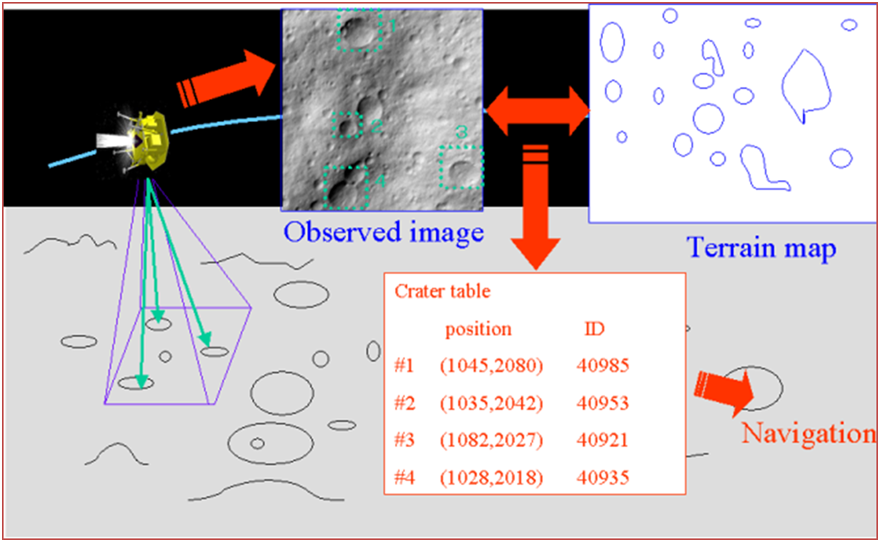
将来の月惑星探査では、狙った場所に探査機を高精度かつ安全に着陸させる必要があります。当研究室では、探査機に搭載したカメラで地表面を見ながら、特徴的地形と地図とのマッチングをすることにより、探査機の飛行位置を正確に測定する方法を研究しています。小惑星探査機「はやぶさ」では、地上で画像をモニタしながら人間がこれを行い、高精度に小惑星イトカワへ着陸させることに成功しましたが、将来の月探査などでは、探査機の搭載計算機がこれを実現できるように、アルゴリズムの研究をしています。また、表面の岩や崖などの障害物を検出し、自律的に回避して着陸する研究も行っています。
Accurate and safe landing is required for future lunar and planetary exploration. Our laboratory studies image-based navigation which uses pattern matching between terrain map of the surface and onboard camera images. In Hayabusa project, operator-based landmark navigation system on ground could help the spacecraft to land on the safe area of asteroid Itokawa. In near future lunar exploration, the system will be installed in onboard computer and spacecraft performs landmark navigation autonomously. Moreover, we study autonomous hazard detection and avoidance for safe landing.