未知剛体の自由回転運動の推定
大阪大学大学院基礎工学研究科 宮崎 文夫・升谷 保博
1.はじめに
私たちの研究室では宇宙ロボットの基礎技術について研究を続けているが,その念頭にあるのは「宇宙ロボットにおける本質的な課題は何か?」という問いである。その一つが「浮遊物体の運動認識」である。ロボットマニピュレータで何か作業を行うために,画像などのセンサ情報に基づいて,その作業対象の物体の位置や姿勢あるいは運動を認識する状況を考える。地上の場合とは異なり,宇宙では,空間に浮遊して3次元的に運動している物体も扱わなければならない。対象を剛体に限定しても,その回転運動は回転軸が時間的に変動する複雑なものである。
宇宙空間における物体の位置や姿勢の推定の問題を扱ったこれまでの研究の多くは,ロボットの作業対象を人工衛星などのように既知の物体であると想定して,画像から抽出された特徴量をあらかじめ持っているモデルと照合したり,既知の慣性パラメータに基づくカルマンフィルタを用いている。しかし,そのような方法は,デブリのような未知の物体を扱うには役に立たない。多様な活動を行う自律的な宇宙ロボットを実現するには,形状パラメータや慣性パラメータが全く与えられていない未知物体に対しても,画像などの情報から位置や姿勢や運動を推定・認識し,さらに未来の値を予測する技術を確立する必要がある。
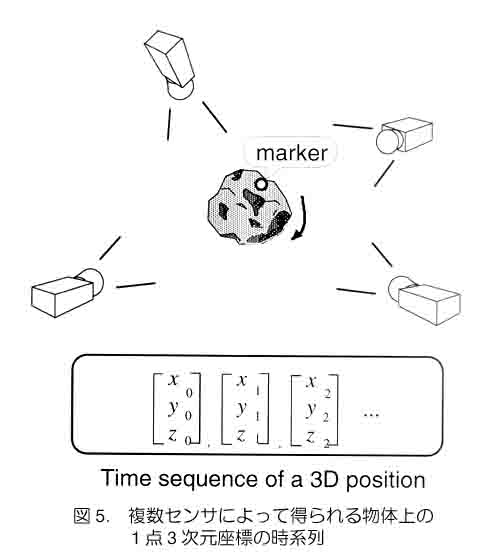
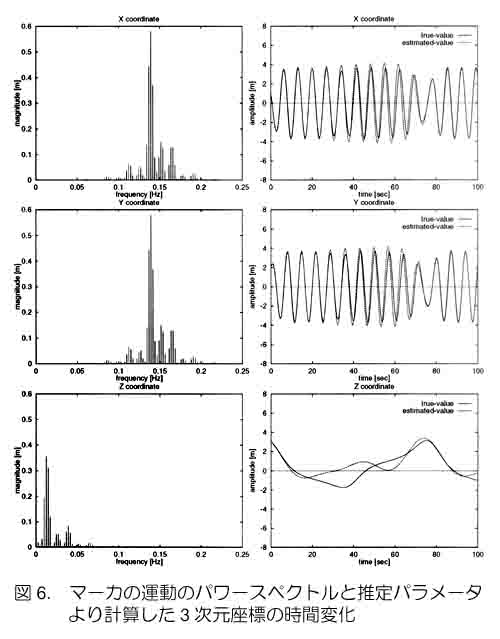
このような背景の下で,私たちは,無重力下で自由運動する未知の剛体の観測データから運動を推定する二つの手法を提案した。本稿では,その問題設定と考え方を簡単に紹介する。
2.剛体の自由運動
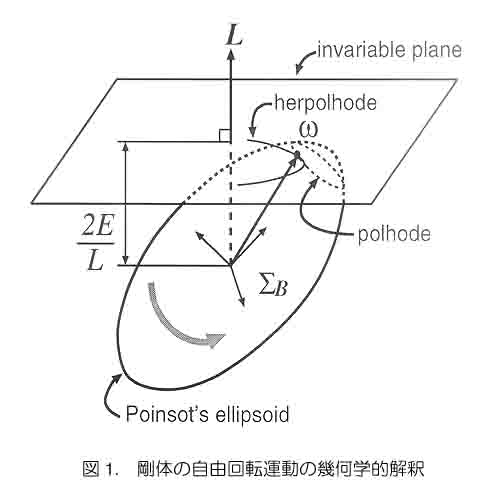
衛星軌道における剛体の回転運動は,外力モーメントが作用しないオイラーの運動方程式を用いてモデル化できる。その解は,自由運動の場合でも,一般には楕円関数で表される扱いの面倒なものになるが,一方で,これを幾何学的に解釈することが可能である(図1)。中心が空間に支持され,物体座標系とともに動く“ポアンソーの楕円体”が,空間に固定された“不変平面”に接して滑らずに転がっている状態で,楕円体の中心から接点へのベクトルがその瞬間の角速度に,平面の法線方向が角運動量ベクトル(一定)の方向に一致する。