エジェクタロケット空力係数取得試験
研究申込者
谷 香一郎 (KSPC/JAXA)
研究要旨
宇宙輸送系推進技術研究開発センター(以下、角田)では、複合サイクルエンジンエンジ
ンの研究を進めている。同エンジンはロケットとラムジェット技術を融合したエンジンであ
り、飛行速度に応じて、ロケット推力調整と、ラム燃焼の追加により、ロケット単体よりも
高いISP を達成し、効率よく加速することを目指したエンジンである。離陸時のように特に
低速の領域では、ロケットエンジンをフルパワーで使い、ロケット排気に誘起された空気流
にも燃料を付加して推力を増強(ISP 向上)を行う、エジェクタジェットモードでの運用を
想定している。角田ではエジェクタジェットモードでの空気吸い込みの特性を予測するため、
いくつかの手法を提案し検証作業を進めている。その一環として、2009 年3 月に、北海道大
学と共同でCAMUI ハイブリッドロケットを用いた飛行試験を実施した。本試験はCAMUI
ロケットの噴射口回りにダクトを付加し、エジェクタ効果を作りだし、亜音速気流中で、燃
焼排気によるエジェクタ効果の検証を行った。
角田では、さらに高亜音速から遷音速域において、同様の飛行試験を近年中に行うことを
計画している。亜音速実験に用いた機体とほぼ比例形状の大型化したロケットにダクトを付
加しての試験となるが、この試験に先立ち、ロケット本体の空力特性を取得することが、今
回の試験の主な目的である。
加えて角田では、ISAS 中のサブワーキンググループと連携して、将来複合サイクルエン
1
ジンのFTB による飛行実験を計画している。この実験では、ロケット先端を加工し、フェ
アリング内部にエンジンを装備することを考えている。この時、機体に与える空力的な影響
について、本試験中で空力係数の変化として取得することを第二の目的とする。以下に本試
験で用いる模型を示す。
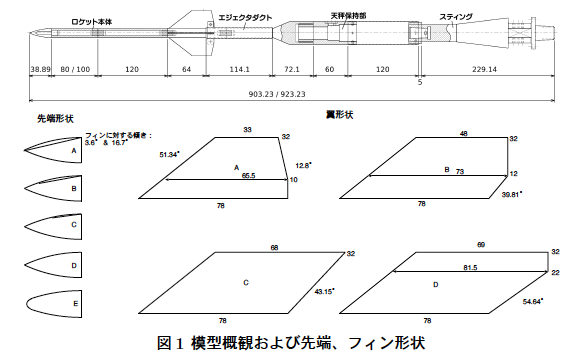
今回の試験の一つ目の目的である、CAMUI ハイブリッドロケットによる遷音速試験にお ける空力係数の取得と、機体安定化の検討のため、フィン部については、面積、形状の違う 4 つ(A〜D) を用意した。また二つ目の目的であるFTB 実験のために、先端Ojive 部に溝を 切った3つのパーツ等、5 形態(A〜E) を用意した。加えて、CAMUI 機体そのものの形状が 現状では未定であることもあり、胴部の長さも二通り(図1 のロケット先端部直下流パーツ を交換、Long 100 mm, Short 80mm) に変更可能である。これら全てについて試験を行うこ とは時間的制約から難しいため、状況に応じて、模型形状の選択し試験を行った。全試験条 件を別添1 に示す。
Key words
空力係数、エジェクタジェット、複合サイクルエンジン、FTB
2010年度の研究成果
A. 空力係数取得
試験は遷音速風洞において実施した。マッハ数は通風前プリセットで0.3、0.6、0.9 の三
通りとし、迎え角を通風中に-5,2,0,2,5,10 度の6 通りに変化させた。各迎え角ステップは1
秒程ホールドしている。各形状について、6 分力を取得を行い、これらの内、軸力(Fx)、揚
力(Fz)、ピッチングモーメント(My) の三力について、値の評価した。今回の模型の問題点
は、ロケット本体が比較的細長く、風洞サイズとの兼ね合いで全長の制約を受けるため、結
果的に直径が小さくなってしまった点である。このため、空力天秤を模型内ではなく、模型
支持のためのスティングの途中に設置した。この場合、天秤で計測される力は模型+支持部
の力となる。そこで通風中にスティング回りの圧力を計測し、スティングにかかる力を推定
し、天秤から得られた力から差し引いて補正を行う手法を試みた。この方法では、模型空力
中心と天秤中心との距離が比較的長くなるため、予め模型にかかる力を推定し、天秤のピッ
チングモーメント容量を越えないよう、比較的容量の大きいNo.1 天秤を用いることとした。
No.1 天秤の最大容量を表1 に示す。

今回は時間の制約からロケット胴部長さをlong タイプに固定し、先端とフィンを交換しつ
つ実験を行った。先端の溝方向とフィンの相対角度は先端A において7 °と17 °の2 ケース
取得、C では7 °とした。フィンは鉛直、水平方向に向くように調整し、鉛直面内で模型に
迎え角を与えている。
図2〜4 に各マッハ数において計測した迎え角に対する力・モーメントを示す。図中、白抜
きは先端形状を変更した比較、塗りつぶしは先端をCAMUI オリジナル形状のE に固定し、
フィンを変えた比較である。
図から明らかな様に、今回の試験ではピッチングモーメントが天秤容量の約60%までに達
するのに対し、軸力や揚力は最大でも容量の10%程度に留まっており、精度が期待できない。
このため、特にFx,Fz についてはM=0.3 において最大でも容量の1%程度の値しか示さず、
データが誤差に埋もれる結果となった。
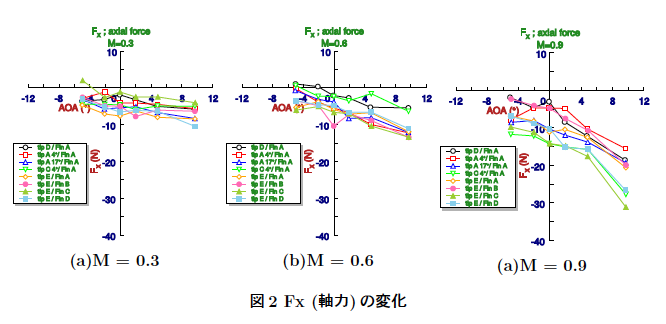
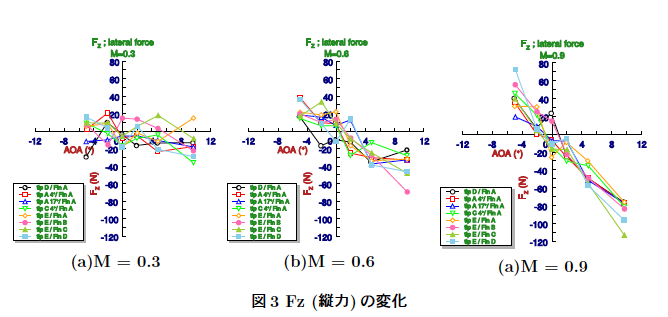
基本的に大型のフィンB〜Dを付けた場合、高迎角時に大きな力を受ける。先端溝の効果 については、今回の形状の範囲内ではデータバラツキの範囲内にあるようで、大きな違いは 見られなかった。なお、M=0.3 については、前述の通り、値が天秤容量に対して非常に小さ く、本データから結論を得ることは難しい。
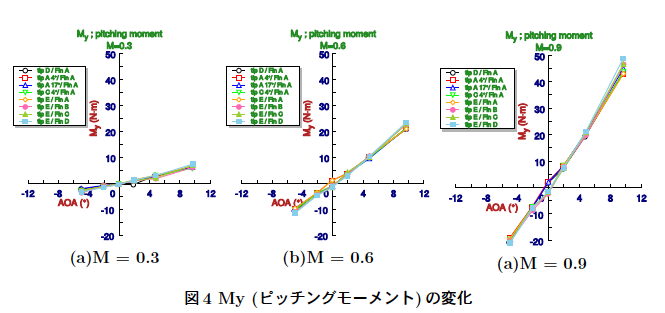
ピッチングモーメントについても軸力、縦力同様、大型フィンがやや大きな値を示す事を
除けば全モデルで大きな違いは見られなかった。先端形状の影響はほぼ無いと結論できる。
なお、通風中は常にビデオ観察を行ったが、目視の範囲内では高迎角時にも振動や不安定な
挙動は観察されなかった。
今後は空力係数推定ソフト(missile-DATCOM) を用いて、今回の結果の再現を試みる。初
期的な比較では軸力、縦力については概ね一致するものの、モーメントについて違いが見ら
れたので、その原因を引き続き検討する。また、今回の試験手法における軸力、縦力の問題
を解決するため、引き続き細長い模型を用いて力を計測する手法を検討する。
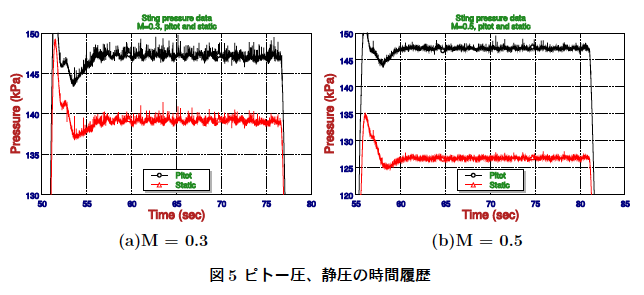
B. ピトー圧計測(参考)
今回の実験中、スティング回りの壁圧を計測したところ、M=0.3 で圧力データに「うね
り」が見られた。配管が長く(約1 m) 配管中の気柱振動など、原因は多岐にわたると思われ
るが、今後の試験の参考として、M=0.3、0.4、0.5 でピトー圧と気流静圧の時間履歴を取得
した。図5 に0.3 と0.5 の結果を示す。周波数解析の結果から0.85 Hz の周期振動であり、パ
ワはマッハ数が上昇するにつれて小さくなる傾向であった。今回の実験では、各迎え角にお
いて1 秒程度の保持時間を設定したが、圧力については、この振動の影響を受けていた可能
性がある。今後原因を精査したい。
利用期間
2010年7月5日〜2010年7月16日