| - Home page |
| - No.267 目次 |
| - 就任にあたり |
| + 研究紹介 |
| - お知らせ |
| - ISAS事情 |
| - 松尾所長を送る |
| - 科学観測気球大空へ |
| - 東奔西走 |
| - 科学衛星秘話 |
| - いも焼酎 |
| - 編集後記 |
| - BackNumber |
図1 小惑星探査ミッションMUSES-C [Ikeshita/MEF/ISAS]
さらに,探査機と地球の間の通信帯域は非常に細く,数10分の往復の電波遅れ時間が想定された。このため,地球からの遠隔操縦は現実的でなく,ローバには,自律的に移動探査する知能が必要であった。
2.2 微小重力下での移動メカニズム
筆者らの研究グループは,長年,月や火星表面を探査するローバの研究を行なってきたが,小惑星のような重力が小さい環境は初めてである。さまざまな検討の結果,車輪型のような表面と接触を保ちながら移動するメカニズムは,以下のような理由から不利であるという結論に達した。
| (1) | ローバが移動するために必要な力は,小惑星表面とローバの間の摩擦力である。小惑星表面は不整地であり,凹凸が存在する。ローバにわずかながらも鉛直方向の力が作用すると,簡単に小惑星表面から離れてしまい,ローバは小惑星表面と接触を保つことができない。接触を保つことができなければ駆動力を伝えることもできない。 |
| (2) | 摩擦力はローバと小惑星との間の接触力に依存してその大きさが変わるため,重力の小さい環境では摩擦力の大きさ自体が非常に小さい。このため,大きな駆動力をかけるとスリップし,小さな駆動力では移動速度が著しく遅くなる。 |
必ずしも接触を保つ必要のない移動メカニズムとして,ホッピング型の移動メカニズムがある。MINERVAの移動メカニズムは,ホップに特化したものを採用する方針を決めた。ホッピングメカニズムでは,ホップする際に,小惑星表面を押し付ける力が働くため,時間は短いながらも接触力を大きくすることできる。このため,移動速度の面からも有利である。
続いて,ホッピングに特化した移動メカニズムに関して,アイデアの募集を行なった。「微小重力移動メカニズム研究会」を発足し,所内外の専門家や大学院生とブレインストーミングを行なった。ジェット推進で移動する方式や,表面を蹴って移動する方式などさまざまなアイデアが出されたが,最終的には,当時大学院生であった筆者が提案した内部トルカ方式を採用した。
MINERVAで採用した移動方式を図2に示す。ローバ内部のトルカによりローバを回転させ,この反力でローバをホップさせる。本方式は以下のような利点を持つ。
| * | 外部に可動部がない。このため,小惑星表面に存在する(と言われている)ほこり(レゴリス)対策を行なう必要がなく,信頼性が高い。 |
| * | ホップ後の姿勢制御を同一のトルカで行なうことができる。 |
| * | 微小重力環境では,トルカとしてギヤなし小型DCモータで十分であり,小型軽量化が可能である。 |
| * | モータ制御により,小惑星からの脱出速度を超えないようにローバがホップする速さを制御できる。 |
このホップメカニズムを提案した時には,シミュレーションによる検討結果を誰も信じようとはしなかった。その後,実際にプロトタイプのローバを製作し,落下塔(カプセルを自由落下させることにより,カプセル内部で数秒間の無重力状態を得ることができる)に足繁く通って実験をすることにより,ローバの動きが目で見て確認できるに至って初めて信用してもらえるようになった。
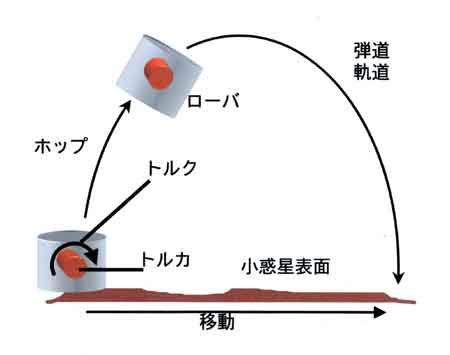
図2 トルカによるホッピング方式