TOP > レポート&コラム > 宇宙科学の最前線 > 次世代の小天体表面探査ローバの実現に向けて
![]()

| │1│2│3│ |
自律機能
MINERVAは、取得した画像を搭載CPU上で評価し、価値の高い画像のみを選別して優先的に送る機能を持っている。この機能が動作したことは、MINERVAが分離後に送信した画像からうかがい知ることができる。
MINERVAの自律探査手法では、小惑星表面からホップして弾道飛行をしている間に画像を適当な時間間隔で撮影する。弾道飛行中に姿勢制御は行わないので、1/2の確率で何も写っていない宇宙空間を撮影することになる。データ保存領域(2MbyteのFlash ROM)はそれほど大きくないので、撮影後に画像を評価し、画像中の何も写っていない領域は棄却して保存しない。
通信速度は9600bpsとあまり大きくないので、情報量の大きな画像から優先的に送信するようになっている。データ保存領域にランダムアクセス型のファイルシステムが構築してあり、画像をファイルとして保存する際、情報量に応じて優先度のラベルを付加する。データ送信タスクでは、この優先度を見て、どのファイルから送るかを決定する。
分離直後に撮影した「はやぶさ」の画像(図2)のサイズは160×80pixelである。本来であれば160×120pixelの画像を取得しているはずだが、下1/3の領域は宇宙空間を撮影しているため、地球に届いていない。また、分離後に定期的に撮影を行っているにもかかわらず、画像が1枚しか届かなかった。その理由は、宇宙空間のみを撮影したか、たとえ小惑星や「はやぶさ」が視野に入っていても、とても小さかったため、何も写っていないと判定されたためであろう。
電気二重層コンデンサの搭載
MINERVAでは、二次電池として、電気二重層コンデンサを初めて搭載している(図5)。これは、既存の二次電池は低温での保存が難しいこと、小惑星表面では昼と夜とで200℃以上の温度差があること、小型化のため電源回路を簡単に作る必要があること、などから採用したものである。
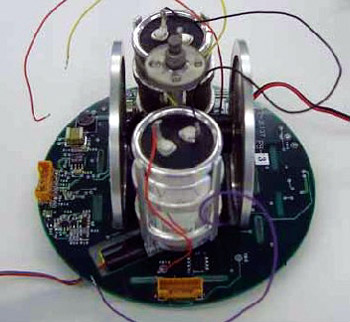
| 図5 搭載した電気二重層コンデンサ | |
MINERVAローバは、分離後の「はやぶさ」側の熱収支の変化が小さくなるよう「はやぶさ」探査機とは熱断熱して取り付けられている。このため、小惑星に到着するまでの惑星空間飛行時には、−65℃と非常に低温になる。
MINERVAのヘルスチェックは、小惑星に到着する前に何度か行った。いずれの場合も、自己発熱により動作温度である−50℃以上になった後は、正常に動作した。また、分離後もローバの電源系は正常であった。このことから、電気二重層コンデンサに関しては、宇宙での使用実績を十分積むことができたといえる。
次の小天体探査ローバ
目標地点に移動できる能力が必要
「はやぶさ」がイトカワに行って分かったことの一つは、このような小さな天体でも表面の状態は一様ではなかったということである。天体が一様であれば、どこに降りても同じであり、表面を移動する必要はない。しかし、イトカワのような小さな天体でもその世界は多様であり、その世界をよりよく知るためには、ローバによる表面移動探査は必須であることを再確認できた。
近年、世界中で計画されている小天体探査ミッションのいくつかでは、アメリカのDeep Impactのように、探査機を小天体に相対速度10km/s以上で衝突させ、人工的にクレータを作ることを考えているものがある。「はやぶさ」も、表面からサンプル採取時に、小さいながらも人工クレータを作る。このような人工クレータは、宇宙空間に長期間さらされていないフレッシュな面を露出させるため、科学的な価値が高い。
将来の小天体探査ローバでは、特定の地形や人工クレータなどの小天体表面上の目的地に行って、観測する能力が必要であると考えている。MINERVAは、小惑星表面をとにかく移動することが目的であり、このような目的地収束能力がない。次世代の小天体探査ローバでは、小天体表面で自己位置を同定し、自己位置を目標位置に収束させるためのナビゲーション技術が必要である。
| │1│2│3│ |