舵面とエンジンを有する小型超音速飛行実験機の空力特性の計測
研究申込者
棚次 亘弘 (室蘭工業大学)
研究要旨
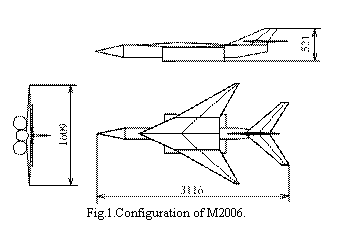
室蘭工大航空宇宙機システム研究センターでは大気中を高速度で飛行するための基盤技術の創出を目的として研究が進められている.また,創出された基盤技術を飛行実証する為,フライングテストベットとして小型無人超音速機の設計が進められている.本年度の風試においては,現在設計が進められているM2006機体形状(Fig. 1)においてエンジン流量が抗力,揚力,ピッチングモーメントに及ぼす影響を検証することを主な目的とした.また,特に影響が大きいと考えられる抗力については,試験結果を利用した解析的な抗力の推定,遷音速領域突破可能性について検討した.
供試体模型に付属する艤装エンジンは実機の作動状態に対応する流量をエンジンインテークに流すことが望ましい.しかし,実際に作動する艤装エンジンを搭載することは難しく,これは推進系を有する機体の空力特性を取得する際の一つの課題となっている.
本研究では,艤装エンジンに可換式オリフィスを設けることにより,エンジンの作動状態に対応する流量を模擬した.また,エンジンの作動プロファイルは現時点で未定の為,本研究では,エンジンは理論上可能である最大流量を吸引していると仮定する.以上の仮定を踏まえた上で,エンジン流量を評価する為のパラメータとして流量吸込率を式(1)で定義する.

但し, fは一様流がエンジン前方投影面積を通過してくる質量流量, dはエンジンの吸い込み流量, corはエンジン修正流量,Aはエンジン前方投影断面積,Patmは大気圧,Tatmは大気温度,Rは気体定数,γは比熱比,Mは飛行マッハ数である.実験条件として,η=0〜0.45の値を用いた.
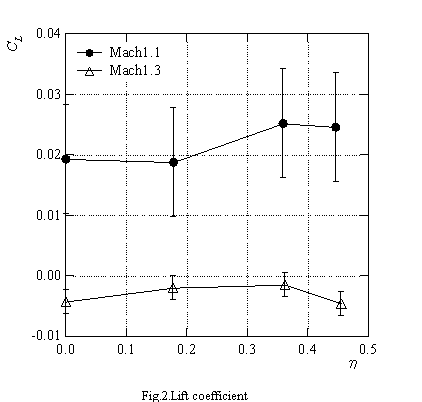
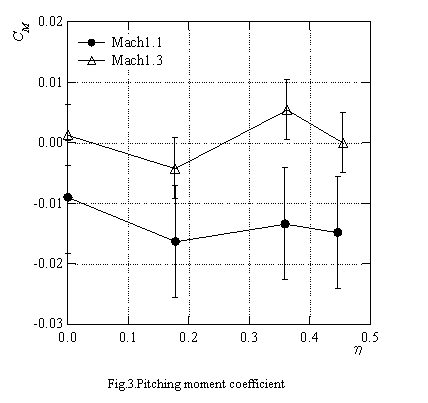

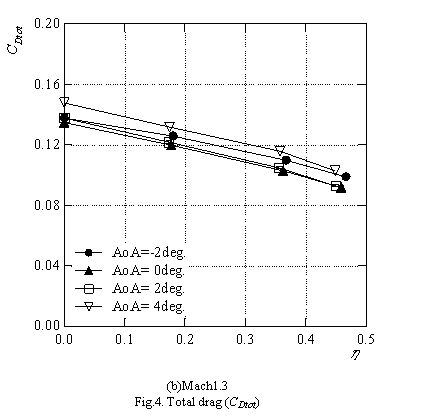
揚力係数,ピッチングモーメント係数,抗力係数をそれぞれFig.2-4に示す.揚力とピッチングモーメントは流量吸い込み率の影響をほとんど受けず,抗力係数は流量吸い込み率の増加に伴ってMach1.1の場合には0.16から0.10まで,Mach1.3の場合には0.14から0.09程度までの値を取ることが分かった.
ηがCDtotに及ぼす影響力はMach1.1の方がMach1.3よりも大きい.そこで,オイルフロー法により両者の流線を比較した(Fig. 5).尚,主流の向きは左方向である.Mach1.1のみエンジンナセル付近で大きな逆流領域が生じていることが確認された.これは流れの剥離を示唆しており,これがCDtotを増加させる原因の一つになっているのではないかと考察される.

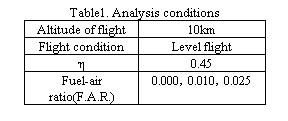
Figure 6は風洞実験の結果を元に,超音速機M2006の推力余裕について解析した結果である.解析条件をTable1に示す.白抜き記号は過去の実験で行なった全開放艤装エンジンを取り付けた場合(η=0.6)であり,黒塗り記号が今回の実験条件のうち最も流量吸い込み率の大きいη=0.45に相当する.使用を想定しているエンジンに対しF.A.Rが0.01-0.025のアフターバーナーを用いることで,遷音速領域における推力余裕が得られることが分かった.


以上をまとめると,エンジンの吸い込み流量の変化により,1)揚力係数やピッチングモーメントへの影響はそれほど考えなくてよいこと,2)全機抗力はη=0.45の場合に対し,η=0.0では1.5倍程度となること,3)その場合,空燃比が0.01-0.025程度のアフターバーナー使用により,遷音速突破は可能であることが明らかとなった.
Key words
Transonic, Unmanned Vehicle, Engine Drag
2009年度の研究成果
- 桑田耕明,飯村拓哉,酒井貴志(室蘭工大・院),溝端一秀,中田大将,吹場活佳,高木正平,東野和幸,棚次亘弘(室蘭工大),丸佑介(JAXA/ISAS), 室蘭工大の小型無人超音速機においてエンジン流量変化が全機空力特性に及ぼす影響, 平成21年度宇宙輸送シンポジウム, 相模原市, 2010年1月14日
利用期間
平成21年11月30日 〜 平成21年12月11日