


TOP > Report & Column > The Forefront of Space Science > 2009 > Flexible Autonomous Thermal Control for Spacecraft
![]()

Proposal and development for new thermal release control One of the most difficult requirements for thermal control is how to cope with large variations in the thermal environment. The variations call for flexibility in thermal control technology. A so-called autonomous controllability, which refers to an ability to detect and control by itself without any external electrical signal, will be also required. One such flexible autonomous thermal control technology is the Reversible Thermal Panel (RTP), a new autonomous heat radiation/absorption device. The newly proposed RTP has a structure with heat radiation planes and endothermic planes combined into one - front and back Eas shown in Fig. 2. The function can be reversed by switching the plane exposed to outer space in response to temperature change. Specifically, when the spacecraft is hot, it exposes the radiation plane, with its high heat-radiation and low sunlight-absorption ratios, to space to expedite heat release. Meanwhile, when the spacecraft is cold, it exposes the endothermic plane, with its low heat-radiation and high sunlight-absorption ratios, to impede heat release. Furthermore, while the spacecraft receives sunlight, the RTP absorbs light energy via the endothermic plane and transfers it inside to warm the onboard equipment. These functions are accomplished by autonomous detection of spacecraft temperature and adjustment of fin-deployment angle without any consumption of electric power. By realizing three functions - excellent heat radiation by deployment of the radiation fins, autonomous adjustment of the heat-radiation area, and heat absorption Ein a single device, it is expected that the electric power required for heaters to maintain temperature will be greatly reduced. This could also contribute to managing the spacecrafts temperature variations caused by changes in the thermal environment and mitigating heat stress. 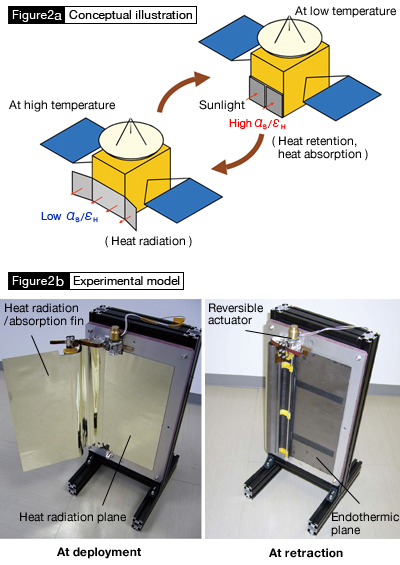
The RTP simultaneously performs three contradictory requirements - heat radiation,Eheat retentionEand heat absorptionE- without requiring electric power. In order to achieve the functions never realized before, the RTP employs two advanced functional materials. A high thermal-conductivity graphite sheet called Pyrolytic Graphite Sheet (PGS) is used for the fins for heat transport and radiation/absorption. A single-crystal shape-memory alloy (SCSMA) is used for the reversible rotary actuator. PGS is fabricated by applying simple heat treatment to polyimide film. Although it is light and flexible, PGS has high heat-conductivity in the in-plane direction (Fig. 3a). To use PGS as a thermal-control material in space, its thermophysical property information as a function of temperatures is required Since PGS is a special material, however, we had no means to measure its thermal conductivity in the in-plane direction and thickness direction. To solve this problem, we introduced a method to add a new anisotropic, simultaneous-measurement theory to the periodic heating method and succeeded in measuring its thermal diffusivity coefficient in three axis directions. In the past, it was also difficult to measure the specific heat of sheet material, but we devised a technique to obtain emissivity and specific heat simultaneously by using the calorimeter method. By applying this method, we were able to identify the sheets physical properties. As a result, it was confirmed that PGS is an extremely light heat transfer material with a density of 1/11 compared to pure copper and 1/3 compared to aluminum while with better thermal conductivity of 1.2 and 2.1 times respectively compared to them. In addition, the ratio of sunlight absorption to emissivity ( α S/ ε H) is 0.7/0.3, which shows that PGS has unique property hardly seen in traditional materials as endothermic plane. We also confirmed that PGS is durable against radiation in space environment. 
For a reversible actuator to drive the heat radiation/absorption fins, the important performance factors are: wide operational temperature range, wide operational stroke, and capability enabling to obtain sufficient operational load. It must also offer appropriate deploying/retracting movement in response to temperature without any electrical element. To this end, we selected the SCSMA of an advanced material and combined it with conston spring. Thus, we developed an actuator to meet the requirements of the RTP. Fig. 3b shows the reversible deployment actuator we developed. SCSMA has excellent features. Its shape-recovery strain is more than twice that of the conventional Ni-Ti-based shape-memory alloys. Further, since the difference in elastic modulus between martensite and austenite of SCSMA is more than seven times, it provides an outstanding operational stroke.
|
||||||||||