|
1. 多目的最適化問題の最適解
2. 最適化手法
3. まとめ
1. 多目的最適化問題の最適解
先月号でお話させていただいたとおり、設計最適化問題は複数の相反する目的を持つ多目的最適化問題である場合が多い。例として、航空機の翼の空力抵抗の最小化と構造重量の最小化の多目的最適化問題を考えてみよう。進化アルゴリズム(後述)という多目的最適化問題に適した最適化手法でこの問題を解くと図1に示すように複数の最適解が得られる。
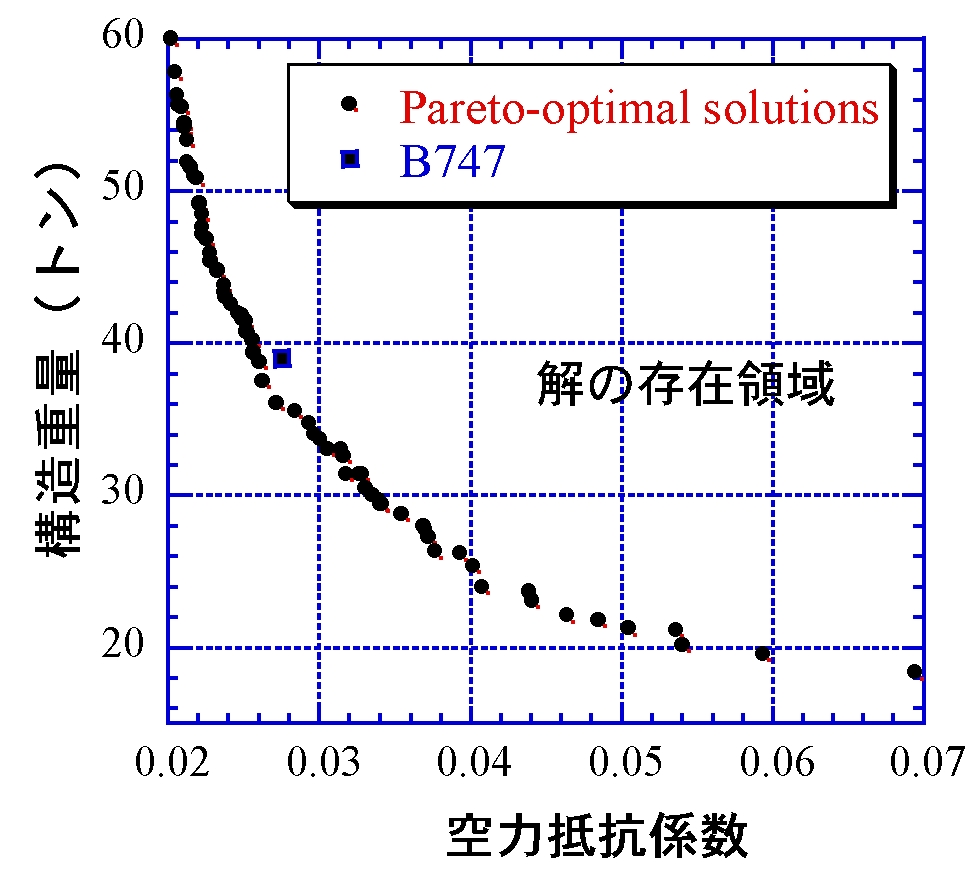
図1.翼の多目的最適化問題における最適解群
この図からわかることは、空力抵抗の最小化と構造重量の最小化という目的は相反する要求であるために(翼を薄くすると抵抗は減るが構造重量は増える。逆に厚くすると抵抗は増えるが構造重量は減る)その両方を最小化する解が存在せず、目的間のトレードオフ面上に複数の解が存在することである。これらの解は他のどの解よりも劣っていないという意味で多目的最適化問題の最適解であり、パレート最適解群と呼ばれる(非劣解群、妥協解群、トレードオフ解群とも呼ばれる)。
一般に、単目的最適化問題を解く際の目標は目的関数を最大化(もしくは最小化)する唯一の解を求めることであるが、多目的最適化問題を解く際の目標はパレート最適解群を得ることである。パレート最適解群を得ることができれば、相反する目的関数間のトレードオフ情報を考慮しながら、パレート最適解群の中から一番よい解を選択することができる。例えば、図1に四角で示してあるボーイング 747 の主翼は構造重量が急激に増大する直前まで空力抵抗値を減らした設計になっているということが推測される。
2. 最適化手法
1940年代から最適化問題を解くためにさまざまな設計最適化手法が提案されてきているが、勾配法と確率的手法に大別することができる。
勾配法とは設計変数に対する目的関数の勾配情報を基に最適解を探索する手法であり、逐次二次計画法や修正許容方向法などがよく使われる。勾配法は、ある設計点からスタートして目的関数の勾配が最も急な方向に登っていく(最小化問題の場合は降りていく)ことにより、目的関数値の最も高い地点(最小化問題の場合は最も低い地点)にたどり着くというのが基本的なアイディアであり、その類似性から山登り法とも呼ばれている。
図2.勾配法のアイディア
目隠しをした登山者が現在の場所の勾配が一番急な方向に登っていくことで山頂(最適解)を目指す。
勾配法の利点は設計変数に対する目的関数の分布が単峰的(でこぼこしていない)であるかぎり、最適解が確実に少ない計算コストで求められる点である。しかしながら、実用的な最適化問題では目的関数の分布が多峰的であることが多いため、一般に、与えられた設計点の近傍しか探査することができず、局所的な最適解(局所最適解)に収束しやすい。また、勾配法は単目的最適化手法なので、パレート解を効率的にとらえることはむずかしい。また、設計変数の数が増加すると目的関数の評価回数も増加し、計算コストが増えるという欠点もある。
一方、確率的手法は勾配情報を用いない手法であり、物質の焼きなまし過程をモデル化した焼きなまし法 (Simulated Annealing) やダーウィンの進化論を模倣した進化アルゴリズム(遺伝的アルゴリズム、進化的計算などとも呼ばれる)などが実際の設計最適化問題でよく用いられている。
焼きなまし法は勾配法が目的関数値を改善する方向にしか最適化を進めなかったのに対し、ある一定の制限のもとで改悪となる方向にも最適化が進むことを許容することで局所最適解への収束を避ける。しかしながら、焼きなまし法も単目的最適化手法であり、パレート解を効率的に得ることができないのは勾配法と同じである。
進化アルゴリズムはダーウィンの進化論をモデルとした最適化アルゴリズムである。そのアイディアは、最適化問題の設計候補群を自然界の個体群、各設計候補の設計変数と目的関数をそれらの個体の設計変数および環境適応度に置き換えて、環境適応度の優れた個体が生き残り子孫をつくることで、ある一定の世代数が過ぎたところで環境適応度の優れた解、つまり最適解を得るというところである。

図3.進化アルゴリズム
進化アルゴリズムは、勾配情報を用いない、一つの解ではなく解集団を最適化させていく、という特徴がある。これらの特徴から1)局所解に収束しにくく大域的な最適解を得ることができる、2)パレート最適解群を効率的に得ることができる、3)目的関数評価コードとのカップリングが容易、などの利点があり、多目的複合領域最適設計に適した手法であることから、最近は頻繁に使われるようになってきている。欠点としては目的関数の評価回数が他の最適化手法に比べて多く、計算コストが高い点が挙げられるが、パレート最適解群を一度に得ることができることを考えると必ずしも計算コストが高いとはいうことができない。また、近年効率のよい進化アルゴリズムが開発されつつある。長期的には、計算機環境がこのまま発展していけば計算時間の問題はなくなっていくと考えられる。
3. まとめ
以上、多目的最適化問題の最適解と最適化手法について簡単に述べさせていただきました。iSIGHT、modeFRONTIERなどの市販の最適化ソフトでもさまざまな最適化手法を選択することができますが、最適化手法を選択する際には以下の点に注意していただければと思います。
- 目的関数の数がひとつで、かつ、すでにある程度よい解があって、それを改善できればよいのであれば効率的に局所探査が可能な勾配法。また、設計変数の数が非常に多い場合は計算コストが設計変数の数に依存しないアドジョイント法を使う手もある。
- 目的関数の数が一つで、あまりよい初期解がない場合は焼きなまし法。
- 目的関数が複数であったり、優れた初期解がない場合は進化アルゴリズム。
このシリーズの最後となりますが、次回は設計最適化手法を実際に最適化問題に適用した例をいくつかご紹介させていただきたいと考えています。
|
