No.194
1997.5 |

|
-
1.2 全機の構成
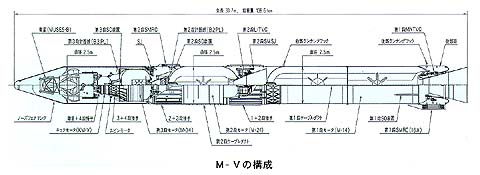

M-Vロケットの基本構成は,固体推進薬を用いた3段式ロケットであるが,ミッションによってはキックモータを第4段として搭載できるよう設計されている。その1号機も,下図に示すようにキックモータを搭載していて,全長30.7m,公称外径2.5m,発射時総重量は衛星を含めて約139你である。M-Vロケットは,補助ロケットや尾翼を持たない点で従来のMロケットと外観上大きく異なる。
【第1段】
 第1段は,わが国最強の推進力を誇るM-14固体ロケットモータと,後部筒,1〜2段接手からなる。
第1段は,わが国最強の推進力を誇るM-14固体ロケットモータと,後部筒,1〜2段接手からなる。
固体ロケットモータとは,モータケースと呼ばれる圧力容器に酸化剤と燃料からなる固体推進薬を充填しノズルを付けたもので,液体燃料ロケットで言えばエンジンと推進剤タンクを合わせたようなものであり,「M-14」はこのロケットモータに与えられた名称である。
M-14ロケットモータは,製造,輸送上の制約から,2分割となっている。M-14ロケットモータは,ピッチとヨー(上下,左右方向)姿勢制御のための首振りノズルによる推力方向制御(MNTVC= Movable Nozzle Thrust Vector Control )装置を備えている。また後部筒にはロール姿勢制御のための固体モータ(SMRC= Solid Motor for Roll Control )が搭載されている。M-14ロケットモータノズル周辺には,MNTVC装置の他,計測装置,テレメータ送信機等の機器が搭載されている。
1〜2段接手は,第2段の点火と1〜2段の分離を同時に行うファイア・イン・ザ・ホール(FIH= Fire In the Hole )と呼ばれる新技術に対応するよう設計されたものである 。
【第2段】
第2段は,M-24ロケットモータ,2〜3段接手,ノーズフェアリングよりなる。2 〜3 段接手内に は,タイマ,テレメータ送信機,コマン ド受信機,レーダトランスポンダ,集中電源,計測器等が搭載されて,第2段計器部を構成している。第2段ロケ ット 燃焼中の姿勢制御は,M-24ロケットモータのノズル内部への液体噴射による推力方向制御(LITVC= Liquid Injection Thrust Vector Control )と2 〜3段接手部に搭載されたSMRCで行い,燃焼終了後はM-24ロケットモータノズル周辺に搭載された小型固体モータSMSJ(= Solid Motor for Side Jet )により行われる。
ノーズフェアリングは,ロケットが大気層を抜けるまで第3段から衛星までの上段部を覆い保護するが,第2段燃焼終了後,新規に開発された開頭機構により分離投棄される。
-
【第3段】
第3段はM-34ロケットモータ,第3段計器部,ノズル周辺に搭載されたサイドジェット(SJ= Side Jet )及び3〜4段接手からなる。M-34ロケット モータと後述のキックモータのノズルは ,下段切り離しまでは縮めておき,点火前に伸展する仕組みとなっている。M-34ロケットモータは燃焼中のピッチ,ヨー姿勢制御のためにMNTVC装置を備えている。SJはヒドラジンを用いたスラスタにより,ロール姿勢制御と燃焼終了後のピッチ,ヨー姿勢制御を行う。また,3〜4段接手には4個の小型固体ロケット(スピンモータ)が搭載されており,3〜4段分離前に第4段姿勢安定化のためのスピンを与える。第3段計器部には航法誘導装置,タイマ,テレメータ送信機,コマンド受信機,レーダトランスポンダ,集中電源,計測装置等多くの機器が搭載されている。なお,航法誘導装置は慣性航法機能をも持つが,1号機では電波誘導を主としている。
【キックステージ】
第4段(キックステージ)はKM-V1ロケットモータ及び衛星接手よりなる。同ロケットモータのノズルも伸展式である。衛星接手には若干の計測装置が搭載されている。第4段は姿勢制御機能は持たず,スピンにより姿勢を保持する。
(小野田淳次郎)
ISASニュース No.194 (無断転載不可)
